基于CAN总线的数字式自动找平控制系统设计
果外部需要的控制偏差超过预先设定的控制范围,系统将认为是故障信号,控制器将停止有关的驱动。仅对纵向传感器有效。
长度单位设定:预设显示值的长度单位。长度单位可在“厘米”、“英寸”选择。仅对纵向传感器有效。
位置系数:位置系数=执行部件的位置变化/传感器产生的位置变化,实际下降高度=传感器位置变化×位置系数。仅对纵向传感器有效。
自检:检测控制器状态。
3.1.3 操作模式选择
包括自动模式(可以改变设定值,控制器自动工作,执行部件将被驱动)、半自动模式(可以改变设定值,控制器无输出)、手动模式(控制器停止自动工作,不改变设定值)。
控制器还具备以下功能:
零点设置:设定标准值;自动识别传感器的类型;故障诊断功能;检测出由传感器,电磁阀,连线或操作程序而出现的错误,并显示出信息或以声,光信号提示;系统上电时,控制器自检;具有驱动电磁阀电路;校正功能;当显示值与实际值不等时,需要进行参数校正;电源极性保护、电压瞬变保护。
3.2 横坡传感器
采用SEIKA固态角度传感器NB43210,具有模拟信号输出,倾角灵敏度0.2°,全密封,用于检测执行部件的坡度值。CPU选用C8051F040,采用其内置CAN总线接口,外部进行光电隔离。
3.3 纵坡传感器
可选配接触式、超声波、超声波平衡梁等不同形式的传感器件。
接触式:旋转电位计采用导电塑料电位器WDD35D系列,阻值1 kΩ~5 kΩ.独立线性度0.2%。转轴可以自零点位置向两个方向转动,利用其机械部件感应参考面进行距离检测。经过C8051F040处理。通过CPU内置CAN总线接口发送,外部进行光电隔离。要求基准绳和参考面固定可靠。
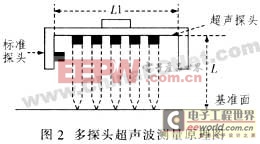
非接触式:超声波传感器常采用多探头超声波技术。如图2所示。该传感器通过多点探测可以精确检测到面或线的细微变化,经过微处理器处理,通过CAN接口发送给控制器。如果测量的是基准地面,对一个超声波探头其原理可用公式表示为:
L=1/2vt
其中t为传播时间,v为已知超声波在介质中的传播速度。超声波传播速度受温度、空气介质等环境因素的影响。这可以通过校准超声波探头检测L1间的超声波传播时间t1来进行校正,即由L1=1/2vt1可得V=2L1/t1,于是有L=t/t1L1。超声波传感器为非接触式测量,使用方便。
4 结束语
数字式控制系统的人机界面友好,操作简单,通过显示器可以清楚地了解具体的偏差值和方向;通过修改软件可以实现不同的控制方法;可以实现系统的智能化。具有故障分析能力,并发出报警信号,将事故消灭在萌芽状态,减少经济损失;以微处理器为核心的数字式控制器可以方便地实现控制器间的通讯。采用CAN总线通信方式使整个系统的结构更加紧凑,系统更加可靠,更具有实用性,易于系统及功能扩展。
CAN总线 自动找平控制系统 C8051F040 相关文章:
- 对TTCAN的分析(05-26)
- 嵌入式Win CE中CAN总线控制器的驱动设计与实现(05-01)
- μC/OS-II的多任务信息流与CAN总线驱动(07-11)
- 采用CAN总线实现DSP芯片程序的受控加载(11-08)
- 基于DSP的电动汽车CAN总线通讯技术设计(10-08)
- 基于DSP的CANopen通讯协议的实现(01-18)