多面体螺纹一体式超声电机的AF应用
随着200万/300万像素手机的进一步普及,在其上实现AF功能将成为手机厂商实现差异化竞争的新手段。AF照相手机比定焦照相手机多出了一个可以自动调节镜头伸缩的微型电机,如步进电机、音圈电机(VCM)、压电超声电机(USM=UltraSonic Motor)等。其中超声电机具有低速大转矩、体积小、重量轻、功率密度大、响应速度快、微位移、不受电磁影响等其他电机不可比拟的优点。多面螺纹一体式超声电机是博立码杰通讯(深圳)有限公司自主研发的一种旋转式超声电机,突破了由驱动电机经传动机构再到达镜头的传统驱动概念,引入螺纹直接驱动概念,省去了中间的传动机构。该电机由粘结有压电片的多边形金属螺母定子和带有外螺纹的转子组成,其中金属螺母外壁加工成多个平面(其横截面可以为6,8,9,12等正多边形),内壁加工出内螺纹;转子为一具有外螺纹的圆柱、圆筒或镜头,定子与转子通过螺纹相啮合。
多面体螺纹一体式超声电机的定子高度小,非常适用于手机模组中以适应手机的超薄趋势。本文基于多面体螺纹一体式超声电机的AF算法为:首先进行第一次粗略的调焦定位,其焦距的调整步距较大,之后进行第二次精确的调焦定位,焦距调整步距较小。实验证明这种算法可以满足实时的需要,在精度方面相对于常规的焦距预制方法有更大的灵活性。
图像清晰度评价
清晰度函数是描述摄像头对图像清晰度评价的函数,镜头所在的位置不同,获得的图像清晰度也不同。自动聚焦意味着系统自动将镜头调整到最佳聚焦位置即清晰度函数最大值位置。
评价图像清晰度的函数大致分为两类,即空域法和频域法。空域法主要有以下几种:
1、基于图像统计的方法,如灰度熵法,灰度方差法和直方图法等;
2、基于图像边缘检测的方法,如Laplacian算子法和Sobel算子法等。频域法即基于变换域的方法,如快速Fourier算法等。以上图像的清晰度曲线图均具有单峰特性。即存在一个唯一的焦距位置使图像的清晰度函数值最大。各种方法在计算速度和对图像清晰度的敏感程度上各不相同,而且对具体的图像也有不同的敏感性。故在选择清晰度函数时必须根据具体要求选择函数,本算法采用频域法分析图像的高低频分量评价图像清晰度。
由于采样、量化、传输以及图像采集过程中的扰动会对图像产生噪声的影响,而最终影响到调焦的效果,在计算图像清晰度前会对图像做相应的滤波处理,这样能提高自动调焦的可靠性。
搜索算法
搜索算法是根据清晰度函数曲线的单峰特性,采用对镜头所处相邻位置处的两幅图像清晰度进行比较,逐步逼近的自动调焦方式,将镜头向清晰度函数增大的方向调整,直至清晰度最大。由于噪声的影响,清晰度函数受到噪声的干忧而呈现非单峰。本文一方面采取BolyRAW图像处理算法,另一方面改进搜索算法和电机控制方法,已在实用中克服清晰度函数受噪声干扰这一难题。
多面体螺纹一体式超声电机的AF算法
在多面体螺纹一体式超声电机应用在自动对焦中,博立码杰采用赖以成名的BolyRAW图像处理算法,通过对感光芯片的反馈信号进行图像清晰度计算,实时控制电机的运动以达到对焦的目的。具体算法如下:首先将镜头通过向远焦位置复位或采用一步试探法确定USM电机转向,确定搜索方向后,第一次粗略调焦定位采用较大的步距驱动USM电机,其步距设置为旋转60~75度最佳,图像将逐渐变清晰,直到图像的清晰度开始减小,即图1中所示M—N—P2—P—P1,这样完成了第一次粗略搜索。此时取图像,将其清晰度与变化前的一帧图像清晰度作比较,判断细调驱动电机方向。接着采用较小(为粗调步距的1/3-1/2)的步距对镜头的位置进行细调,图像将再次逐渐变清晰,当图像的清晰度开始减小后再反向驱动一小步,结束第二次搜索,找到最大值即图中所示P1—P—P2—P。完成整个调焦过程大约需要10步,焦距的调节精度由步距决定,改变其大小可改变调节的速度和精度,步距愈小,定位的精度越高,速度越慢。
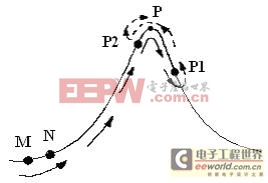 |
图1 调焦搜索过程 |
应用实例
博立码杰公司采用前述调焦算法已在OV3640的模组上分别用PC及DSP作为计算单元实现,其良好的可移植性使其可以用在多数手机上已有的基带处理器或协处理器上,无需增加任何硬件成本。调焦效果如图2所示,其中电机型号为BM730-A1,感光芯片OV3640。图3为某带AF功能品牌手机的对焦效果图。从图对比可知,本文的对焦算法所得图像更加清晰,分辨率更高。
 |
图2 本文AF算法效果图 |
 |
图3 某品牌手机对焦效果图 |
- 变形机翼分布式超声电机驱动的应用设计方案(12-21)
- 基于NiosⅡ的超声电机驱动控制电路(04-06)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)