一种无刷直流电动机控制系统设计
时间:01-02
来源:互联网
点击:
1.引言
永磁直流无刷电机是近年来迅速成熟起来的一种新型机电一体化电机。该电机由定子、转子和转子位置检测元件霍尔传感器等组成,由于没有励磁装置,效率高、结构简单、工作特性优良,而且具有体积更小、可靠性更高、控制更容易、应用范围更广泛、制造维护更方便等优点,使无刷电机的研究具有重大意义。
本系统设计是利用调压调速,根据调整供电PWM电源的占空比进而调整电压的方式实现。本设计采用无刷直流电机专用控制芯片MC33035,它能够对霍尔传感器检测出的位置信号进行译码,它本身更具备过流、过热、欠压、正反转选择等辅助功能,组成的系统所需外围电路简单,设计者不必因为采用分立元件组成庞大的模拟电路,使得系统的设计、调试相当复杂,而且要占用很大面积的电路板。
MC33035和MC33039这两种集成芯片也可以方便地完成无刷直流电动机的正反转、运转起动以及动态制动、过流保护、三相驱动信号的产生、电动机转速的简易闭环控制等。利用专用集成芯片构成的无刷直流电机控制系统,具有集成度高、速度快及完善的保护功能等特点。驱动电路结构简单,因而整个线路外围元件少、走线简单,可大大减小逆变器体积。
2.系统原理
该闭环速度控制系统用三个霍尔集成电路作为转子位置传感器。用MC33035的8脚参考电压(6.24V)作为它们的电源,霍尔集成电路输出信号送至MC33035和MC33039。系统控制结构框图如图1所示,MC33039的输出经低通滤波器平滑,引入MC33035的误差放入器的反相输入端,而转速给定信号经积分环节输入MC33035的误差放大器的同相输入端,从而构成系统的转速闭环控制。
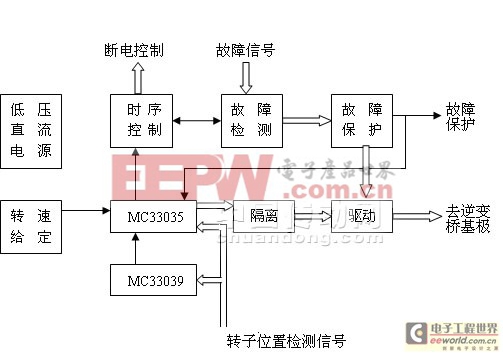
图1系统控制原理
3.控制电路设计
MC33035的工作电源电压范围很宽,在10V-30V之间,芯片内含有基准电压6.25V。MC33035内部的转子位置译码器主要用于监控三个传感器输入,以便系统能够正确提供高端和低端驱动输入的正确时序。传感器输入可直接与集电极开路型霍尔效应开关或者光电耦合器相连接。此外,该电路还内含上拉电阻,其输入与门限典型值为2.2V的TTL电平兼容。用MC33035系列产品控制的三相电机可在最常见的四种传感器相位下工作。MC33035所提供的60°/120°选择可使MC33035很方便地控制具有60°、120°、240°或300°的传感器相位电机。其三个传感器输入有八种可能的输入编码组合,其中六种是有效的转子位置,另外两种编码组合无效,通过六个有效输入编码可使译码器在使用60°电气相位的窗口内分辨出电机转子的位置。MC33035直流无刷电机控制器的正向/反向输出可通过翻转定子绕组上的电压来改变电机转向。当输入状态改变时,指定的传感器输入编码将从高电平变为低电平,从而改变整流时序,以使电机改变旋转方向。电机通/断控制可由输出使能来实现,当该管脚开路时,连接到正电源的内置上拉电阻将会启动顶部和底部驱动输出时序。而当该脚接地时,顶端驱动输出将关闭,并将底部驱动强制为低,从而使电动机停转。MC33035中的误差放大器、振荡器、脉冲宽度调制、电流限制电路、片内电压参考、欠压锁定电路、驱动输出电路以及热关断等电路的工作原理及操作方法与其它同类芯片的方法基本类似。MC33035外围电路如图2。

图2MC33035外围电路
如图所示,我们给电压为24V的电源,F/R控制电机转向,正向/反向输出可通过翻转定子绕组上的电压来改变电机转向。当输入状态改变时,指定的传感器输入编码将从高电平变为低电平,从而改变整流时序,以使电机改变旋转方向。
电机通/断控制可由输出使能7管脚来实现,当该管脚开路时,连接到正电源的内置上拉电阻将会启动顶部和底部驱动输出时序。而当该脚接地时,顶端驱动输出将关闭,并将底部驱动强制为低,从而使电动机停转。
由于MC33035的8管脚提供6.25V标准电压输出,因此可以用此电压给霍尔元器件以及其他器件供电,在这个系统中PWM信号的产生是很容易的,而且PWM信号的频率可以由外部电路调节,其频率由公式 决定,R5是一个可变电阻,通过调节R5,即可改变PWM信号的频率。只需要在MC33035的外围加一个电容、一个电阻及一个可调电位器即可产生我们所需要的脉宽调制信号。因MC33035的8管脚输出为6.25V标准电压,由R6、C1组成了一个RC振荡器,所以10管脚的输入近似一三角波,其频率由
决定,R5是一个可变电阻,通过调节R5,即可改变PWM信号的频率。只需要在MC33035的外围加一个电容、一个电阻及一个可调电位器即可产生我们所需要的脉宽调制信号。因MC33035的8管脚输出为6.25V标准电压,由R6、C1组成了一个RC振荡器,所以10管脚的输入近似一三角波,其频率由 决定。R5为控制无刷电机转速的电位器,通过该电位器改变11管脚对地的电压,从而来改变电机的转速。运算放大器1由外部接成一个跟随器的形式,所以11管脚的对地电压即为比较器2的反相输入电压,通过电位器R5改变11脚的对地电压从而改变比较器2的输出方波的占空比,即比较器2的输出为我们所需的PWM信号。
决定。R5为控制无刷电机转速的电位器,通过该电位器改变11管脚对地的电压,从而来改变电机的转速。运算放大器1由外部接成一个跟随器的形式,所以11管脚的对地电压即为比较器2的反相输入电压,通过电位器R5改变11脚的对地电压从而改变比较器2的输出方波的占空比,即比较器2的输出为我们所需的PWM信号。
14管脚是故障输出端,L1用作故障指示,当出现无效的传感器输入码、过流、欠压、芯片内部过热、使能端为低电平时,LED发光报警,同时自动封锁系统,只有故障排除后,经系统复位才能恢复正常工作。R6及C1决定了内部振荡器频率(也即PWM的调制频率),转速给定电位计W的输出经过积分环节输入MC33035的误差放大器的同相输入端,其反向输入端与输出端相连,这样,误差放大器便构成了一个单位增益电压跟随器,从而完成系统的转速控制。
8管脚接一NPN的三极管,当8脚电压为高电平时,三极管导通,为MC33039和霍耳传感器提供电压。电解电容C2是滤波作用,防止电流回流。
MC33035的17管脚的输入电压低于9.1V时,由于17脚的输入连接内部一比较器的同相输入端,该比较器的反相输入为内部一9.1V标准电压,此时MC33035通过与门将驱动下桥的三路输出全部封锁,下桥的三个功率三极管全部关断,电机停止运行,起欠压保护作用。过热保护等功能是芯片内部的电路,无需设计外围电路。
该系统的无刷直流电机内置有3个霍尔效应传感器用来检测转子位置,一旦决定电机的换相,并可以根据该信号来计算电机的转速。传感器的输出端直接接MC33035的4、5、6管脚。当电机正常运行时,通过霍尔传感器可得到3个脉宽为180度电角度的互相重叠的信号,这样就得到6个强制换相点,MC33035对3个霍尔信号进行译码,使得电机正确换相。
当MC33035的11脚接地时,电机转速为0,即可实现刹车制动。
MC330399是Motorola公司配合MC33035专门设计的无刷电机闭环速度控制器,这是一个8脚的双列直插窄式集成电路块。MC33039对输入的转子位置信号码进行有关的处理,产生一个与电机实际转速成正比的转速电压信号。
从电机转子位置检测器送来的三相位置检测信号(SA、SB、SC)一方面送入MC33035,经芯片内部译码电路结合正反转控制端、起停控制端、制动控制端、电流检测端等控制逻辑信号状态,经过运算后,产生逆变器三相上、下桥臂开关器件的六路原始控制信号,其中,三相下桥开关信号还要按无刷直流电机调速机理进行脉宽调制处理。处理后的三相下桥PWM控制信号(AB、BB、CB)及三相上桥控制信号(AT、BT、CT)经过驱动放大后,施加到逆变器的六个开关管上,使其产生出供电机正常运行所需的三相方波交流电流。另一方面,转子位置检测信号还送入MC33039,经F/V转换,得到一个频率与电机转速成正比的脉冲信号FOUT,其通过简单的阻容网络滤波后形成转速反馈信号,利用MC33035中的误差放大器即可构成一个简单的P调节器,实现电机转速的闭环控制。实际应用中,还可用外接各种PI、PID调节电路实现复杂的闭环调节控制,如图3所示。

图3MC33039构成的闭环控制系统电路图
从MC33039的5脚输出的脉冲数是电动机每一转输出12个脉冲。按电动机最高转速来选择定时元件。设最高转速是3500r/min,即58r/s。此时,每秒输出脉冲数是58×12=696个。即其频率约为700Hz,周期约为1.4ms。根据MC33039技术手册,取定时元件参数R21=100KΩ,C4=0.01uF,单稳态电路产生脉冲宽度为1340ns。8脚接MC33035的基准电压。5脚输出经100k电阻接MC33035的12脚(误差放大器反相输入端)。放大器此时增益为10倍,0.1μF的电容起滤波平滑作用。MC33035振荡器参数:电阻取5.1kΩ,电容取0.1μF,PWM频率约为2.4kHz。该系统采用无感电阻(0.04Ω,0.5W)作为电流检测用,并经1.1kΩ电阻连接到9脚。
由于22脚接地为低电平,因此控制电路工作在120°的传感器电气相位输入状态下。
4.驱动电路设计

图4驱动电路图
如图4所示,其输出的下桥三路驱动信号可直接驱动N沟通功率MOSFET的IRF530,上桥三路驱动信号可直接驱动P沟通功率MOSFET的IRF9530。MC33035的1、2、24脚的信号经过IRF9530放大,19、20、21脚的信号经过IRF530得到的信号驱动无刷直流电动机转动。A、B、C分别与无刷直流电动机三相绕组成三角形接法。
5.实验结果

图5驱动信号
图5中的2路驱动信号,分别属于某一桥壁的上下两只MOSFET的驱动信号,比较可知,每支开关管一周期导通120°,并且2路驱动信号间不可能重合。
6.结论
本文设计的直流无刷电机控制系统,是采用纯硬件方式实现的,它具有简单、可靠、体积小、低成本的特点,尤其是配合MC33039构成转速闭环控制后,调速性能非常优异。但是由于MC33035的PWM调制方式为调节占空比,这就难以改善输出电流的波形,电机运行时有一定的转矩脉动。总之,MC33035非常适于小功率无刷电机的控制,尤其可应用于伺服机构、机电一体化的调速设备。
参考文献:
[1]张琛.直流无刷电动机原理及应用(第二版).北京:机械工业出版社.2004.
[2]谭建成.电机控制专用集成电路.北京:机械工业出版社.1997.
[3]万国庆,许清泉,崔晓芸.MC33035无刷电机驱动控制器及应用[A].常州工学院学报,2005,18(5):36-39.
[4]韦敏,季小尹.MC33035在直流无刷电机控制中的应用.电工技术杂志,2004,11:83-85.
[5]潘建.无刷直流电机控制器MC33035的原理及其应用.国外电子元器件,2003,8:38-41
[6]王海峰,江汉红,陈少昌.直流无刷电机系统的最佳控制器设计.电机与控制应用,2005.32(7):24-28.
[7]孙冠群李晓青张犁锁.SR电机调速系统控制器设计.中国计量学院学报,2006.17(3):207-211
永磁直流无刷电机是近年来迅速成熟起来的一种新型机电一体化电机。该电机由定子、转子和转子位置检测元件霍尔传感器等组成,由于没有励磁装置,效率高、结构简单、工作特性优良,而且具有体积更小、可靠性更高、控制更容易、应用范围更广泛、制造维护更方便等优点,使无刷电机的研究具有重大意义。
本系统设计是利用调压调速,根据调整供电PWM电源的占空比进而调整电压的方式实现。本设计采用无刷直流电机专用控制芯片MC33035,它能够对霍尔传感器检测出的位置信号进行译码,它本身更具备过流、过热、欠压、正反转选择等辅助功能,组成的系统所需外围电路简单,设计者不必因为采用分立元件组成庞大的模拟电路,使得系统的设计、调试相当复杂,而且要占用很大面积的电路板。
MC33035和MC33039这两种集成芯片也可以方便地完成无刷直流电动机的正反转、运转起动以及动态制动、过流保护、三相驱动信号的产生、电动机转速的简易闭环控制等。利用专用集成芯片构成的无刷直流电机控制系统,具有集成度高、速度快及完善的保护功能等特点。驱动电路结构简单,因而整个线路外围元件少、走线简单,可大大减小逆变器体积。
2.系统原理
该闭环速度控制系统用三个霍尔集成电路作为转子位置传感器。用MC33035的8脚参考电压(6.24V)作为它们的电源,霍尔集成电路输出信号送至MC33035和MC33039。系统控制结构框图如图1所示,MC33039的输出经低通滤波器平滑,引入MC33035的误差放入器的反相输入端,而转速给定信号经积分环节输入MC33035的误差放大器的同相输入端,从而构成系统的转速闭环控制。
图1系统控制原理
3.控制电路设计
MC33035的工作电源电压范围很宽,在10V-30V之间,芯片内含有基准电压6.25V。MC33035内部的转子位置译码器主要用于监控三个传感器输入,以便系统能够正确提供高端和低端驱动输入的正确时序。传感器输入可直接与集电极开路型霍尔效应开关或者光电耦合器相连接。此外,该电路还内含上拉电阻,其输入与门限典型值为2.2V的TTL电平兼容。用MC33035系列产品控制的三相电机可在最常见的四种传感器相位下工作。MC33035所提供的60°/120°选择可使MC33035很方便地控制具有60°、120°、240°或300°的传感器相位电机。其三个传感器输入有八种可能的输入编码组合,其中六种是有效的转子位置,另外两种编码组合无效,通过六个有效输入编码可使译码器在使用60°电气相位的窗口内分辨出电机转子的位置。MC33035直流无刷电机控制器的正向/反向输出可通过翻转定子绕组上的电压来改变电机转向。当输入状态改变时,指定的传感器输入编码将从高电平变为低电平,从而改变整流时序,以使电机改变旋转方向。电机通/断控制可由输出使能来实现,当该管脚开路时,连接到正电源的内置上拉电阻将会启动顶部和底部驱动输出时序。而当该脚接地时,顶端驱动输出将关闭,并将底部驱动强制为低,从而使电动机停转。MC33035中的误差放大器、振荡器、脉冲宽度调制、电流限制电路、片内电压参考、欠压锁定电路、驱动输出电路以及热关断等电路的工作原理及操作方法与其它同类芯片的方法基本类似。MC33035外围电路如图2。
图2MC33035外围电路
如图所示,我们给电压为24V的电源,F/R控制电机转向,正向/反向输出可通过翻转定子绕组上的电压来改变电机转向。当输入状态改变时,指定的传感器输入编码将从高电平变为低电平,从而改变整流时序,以使电机改变旋转方向。
电机通/断控制可由输出使能7管脚来实现,当该管脚开路时,连接到正电源的内置上拉电阻将会启动顶部和底部驱动输出时序。而当该脚接地时,顶端驱动输出将关闭,并将底部驱动强制为低,从而使电动机停转。
由于MC33035的8管脚提供6.25V标准电压输出,因此可以用此电压给霍尔元器件以及其他器件供电,在这个系统中PWM信号的产生是很容易的,而且PWM信号的频率可以由外部电路调节,其频率由公式
决定,R5是一个可变电阻,通过调节R5,即可改变PWM信号的频率。只需要在MC33035的外围加一个电容、一个电阻及一个可调电位器即可产生我们所需要的脉宽调制信号。因MC33035的8管脚输出为6.25V标准电压,由R6、C1组成了一个RC振荡器,所以10管脚的输入近似一三角波,其频率由决定。R5为控制无刷电机转速的电位器,通过该电位器改变11管脚对地的电压,从而来改变电机的转速。运算放大器1由外部接成一个跟随器的形式,所以11管脚的对地电压即为比较器2的反相输入电压,通过电位器R5改变11脚的对地电压从而改变比较器2的输出方波的占空比,即比较器2的输出为我们所需的PWM信号。14管脚是故障输出端,L1用作故障指示,当出现无效的传感器输入码、过流、欠压、芯片内部过热、使能端为低电平时,LED发光报警,同时自动封锁系统,只有故障排除后,经系统复位才能恢复正常工作。R6及C1决定了内部振荡器频率(也即PWM的调制频率),转速给定电位计W的输出经过积分环节输入MC33035的误差放大器的同相输入端,其反向输入端与输出端相连,这样,误差放大器便构成了一个单位增益电压跟随器,从而完成系统的转速控制。
8管脚接一NPN的三极管,当8脚电压为高电平时,三极管导通,为MC33039和霍耳传感器提供电压。电解电容C2是滤波作用,防止电流回流。
MC33035的17管脚的输入电压低于9.1V时,由于17脚的输入连接内部一比较器的同相输入端,该比较器的反相输入为内部一9.1V标准电压,此时MC33035通过与门将驱动下桥的三路输出全部封锁,下桥的三个功率三极管全部关断,电机停止运行,起欠压保护作用。过热保护等功能是芯片内部的电路,无需设计外围电路。
该系统的无刷直流电机内置有3个霍尔效应传感器用来检测转子位置,一旦决定电机的换相,并可以根据该信号来计算电机的转速。传感器的输出端直接接MC33035的4、5、6管脚。当电机正常运行时,通过霍尔传感器可得到3个脉宽为180度电角度的互相重叠的信号,这样就得到6个强制换相点,MC33035对3个霍尔信号进行译码,使得电机正确换相。
当MC33035的11脚接地时,电机转速为0,即可实现刹车制动。
MC330399是Motorola公司配合MC33035专门设计的无刷电机闭环速度控制器,这是一个8脚的双列直插窄式集成电路块。MC33039对输入的转子位置信号码进行有关的处理,产生一个与电机实际转速成正比的转速电压信号。
从电机转子位置检测器送来的三相位置检测信号(SA、SB、SC)一方面送入MC33035,经芯片内部译码电路结合正反转控制端、起停控制端、制动控制端、电流检测端等控制逻辑信号状态,经过运算后,产生逆变器三相上、下桥臂开关器件的六路原始控制信号,其中,三相下桥开关信号还要按无刷直流电机调速机理进行脉宽调制处理。处理后的三相下桥PWM控制信号(AB、BB、CB)及三相上桥控制信号(AT、BT、CT)经过驱动放大后,施加到逆变器的六个开关管上,使其产生出供电机正常运行所需的三相方波交流电流。另一方面,转子位置检测信号还送入MC33039,经F/V转换,得到一个频率与电机转速成正比的脉冲信号FOUT,其通过简单的阻容网络滤波后形成转速反馈信号,利用MC33035中的误差放大器即可构成一个简单的P调节器,实现电机转速的闭环控制。实际应用中,还可用外接各种PI、PID调节电路实现复杂的闭环调节控制,如图3所示。
图3MC33039构成的闭环控制系统电路图
从MC33039的5脚输出的脉冲数是电动机每一转输出12个脉冲。按电动机最高转速来选择定时元件。设最高转速是3500r/min,即58r/s。此时,每秒输出脉冲数是58×12=696个。即其频率约为700Hz,周期约为1.4ms。根据MC33039技术手册,取定时元件参数R21=100KΩ,C4=0.01uF,单稳态电路产生脉冲宽度为1340ns。8脚接MC33035的基准电压。5脚输出经100k电阻接MC33035的12脚(误差放大器反相输入端)。放大器此时增益为10倍,0.1μF的电容起滤波平滑作用。MC33035振荡器参数:电阻取5.1kΩ,电容取0.1μF,PWM频率约为2.4kHz。该系统采用无感电阻(0.04Ω,0.5W)作为电流检测用,并经1.1kΩ电阻连接到9脚。
由于22脚接地为低电平,因此控制电路工作在120°的传感器电气相位输入状态下。
4.驱动电路设计
图4驱动电路图
如图4所示,其输出的下桥三路驱动信号可直接驱动N沟通功率MOSFET的IRF530,上桥三路驱动信号可直接驱动P沟通功率MOSFET的IRF9530。MC33035的1、2、24脚的信号经过IRF9530放大,19、20、21脚的信号经过IRF530得到的信号驱动无刷直流电动机转动。A、B、C分别与无刷直流电动机三相绕组成三角形接法。
5.实验结果
图5驱动信号
图5中的2路驱动信号,分别属于某一桥壁的上下两只MOSFET的驱动信号,比较可知,每支开关管一周期导通120°,并且2路驱动信号间不可能重合。
6.结论
本文设计的直流无刷电机控制系统,是采用纯硬件方式实现的,它具有简单、可靠、体积小、低成本的特点,尤其是配合MC33039构成转速闭环控制后,调速性能非常优异。但是由于MC33035的PWM调制方式为调节占空比,这就难以改善输出电流的波形,电机运行时有一定的转矩脉动。总之,MC33035非常适于小功率无刷电机的控制,尤其可应用于伺服机构、机电一体化的调速设备。
参考文献:
[1]张琛.直流无刷电动机原理及应用(第二版).北京:机械工业出版社.2004.
[2]谭建成.电机控制专用集成电路.北京:机械工业出版社.1997.
[3]万国庆,许清泉,崔晓芸.MC33035无刷电机驱动控制器及应用[A].常州工学院学报,2005,18(5):36-39.
[4]韦敏,季小尹.MC33035在直流无刷电机控制中的应用.电工技术杂志,2004,11:83-85.
[5]潘建.无刷直流电机控制器MC33035的原理及其应用.国外电子元器件,2003,8:38-41
[6]王海峰,江汉红,陈少昌.直流无刷电机系统的最佳控制器设计.电机与控制应用,2005.32(7):24-28.
[7]孙冠群李晓青张犁锁.SR电机调速系统控制器设计.中国计量学院学报,2006.17(3):207-211
- 基于DSP的无刷直流电机调速系统(06-01)
- 基于DSP的无刷直流电机伺服系统设计(03-14)
- 基于DSP储能飞轮用无刷直流电机的数字控制系统(06-08)
- 基于TMS320F2812无刷直流电机控制系统设计 (06-27)
- DSP在三相无刷直流电机控制系统的应用(01-10)
- 基于dsPIC30F3010实现无刷直流电机的无传感器控制(05-20)