基于CAN总线多轴运动控制器技术的研究
当前比较新的研究方向就是将运动控制技术与工业总线和网络技术结合起来。过去都是采用一般控制器和驱动器控制结构,这样的结构存在现场配线多、多轴同步性差、非数字化等缺点,而且很难通过外部运动控制实时调整伺服参数。由于工业网络技术的发展和应用,可以通过网络技术来解决过去运动控制结构中存在的一些问题。基于工业总线和网络技术运动控制器获得了极大的发展,已经应用于多轴同步控制中。越来越多的传统的以机械轴同步的系统开始采用网络总线运动控制的多电机直轴控制,这样可以减少系统的维护和增加系统的柔性。由于arm、dsp和fpga等处理器芯片的广泛应用,运动控制器将随着工业总线和网络技术、运动控制技术的不断进步和完善,运动控制器将进一步向网络化、数字化、智能化方向纵深发展。
2 研究内容和关键技术
高速高精度、同步控制以及多轴协调控制是目前运动控制中的重要研究内容。在运动控制系统中,本文旨在通过方法创新,提出了一种系统稳定性好、快速响应性、控制精度高的基于can总线多轴运动控制器的设计思路。
2.1 研究内容
应从以下几个方面对运动控制器进行研究:
(1) 对单轴伺服跟踪误差产生原因和如何减小跟踪误差的研究。
(2) 对多轴联动产生的轮廓误差产生的原因和如何减小轮廓误差的研究。
(3) 对基于can总线控制的原理和实现的研究。
(4)对先进的控制算法研究,如伺服调节、pvt算法、样条插补、反向运动学算法、空间圆弧插补、速度前瞻和轨迹拟合,以及电子齿轮、电子凸轮、虚拟轴、高速位置锁存、位置比较输出等。
2.2 关键技术
运动控制器应用的目的就是使得被控对象的性能体现在高精度、响应快、稳定性好方面,具体而言就是如何减小单轴伺服跟踪误差,特别是多轴联动时,轮廓轨迹的插补算法以及如何实现同步,减少轮廓误差,以及基于can总线通讯如何实现插补及闭环控制。
3 研究方法和可行性分析
针对运动控制器的稳定性、快速响应性和高精度性的要求,本文提出了采用基于arm平台,以dsp芯片作为核心处理器设计方案,系统结构框图如图1所示。这样将arm平台的信息处理能力和开放式的特点与运动控制器的运动轨迹控制能力有机的结合在一起,使运动控制器具有信息处理能力较强、开放程度较高、运动轨迹控制准确、通用性好的特点。充分利用了dsp的高速数据处理器功能,便于设计出功能完善、性能优越的运动控制器。能提供多轴协调运动控制与复杂的运动轨迹、实时的插补运算、误差补偿、伺服滤波算法,能够实现闭环控制。充分利用can总线技术,通信速率最高可达1mbp/40m,直接传输距离最远可达10km/kbps,可挂接设备最多可达110个。can的信号传输采用短帧结构,每一帧的有效数字节数为8个,因而传输时间短,受干扰的概率低,使整个系统的结构更加合理和开放。
基于arm平台,以dsp为核心处理器的运动控制器,可以减少arm的负担,使得arm平台可以专注于人机界面、轨迹规划、粗插补运算、实时监控和发送指令等系统管理工作;而dsp处理器用来实时处理所有运动的控制细节:加减速计算、行程计算、多轴插补等,充分体现dsp在信号处理和计算上的优势。
运动控制器通过can总线可以方便向各个伺服单元发送控制指令和位置指令,并实时的获得各个伺服电机的状态信息,按照需要实时地对伺服参数进行修改,各个伺服单元也可以通过can总线及时的进行数据交换。当节点严重错误时,具有自动关闭的功能以切断该节点与总线的联系,使总线上的其他节点及其通信不受影响,具有较强的抗干扰能力。由于运动控制器的位置指令直接输入到各个伺服驱动器,因此每个伺服单元都获得同步控制指令,使得任何一伺服驱动器不受其他伺服驱动器干扰影响。控制器采用arm+dsp可使产品通用性强,可以被广泛的应用于数控产品中,具有较强的硬实时性;快速响应性;由于采用can总线控制,使系统在应用中可根据实际情况扩展多个伺服驱动控制器,具有灵活性;体积小;造价低等优点。

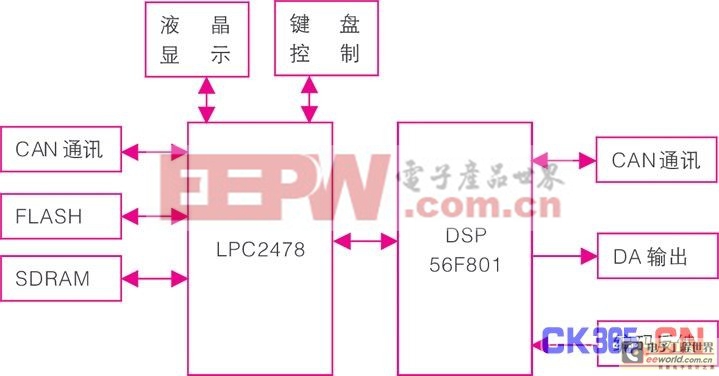
图1 系统结构框图
4 结束语
本文提出的基于can总线多轴运动控制器的设计思路,具有以下优点:
(1)多轴运动控制器采用arm+ dsp,使系统具有稳定性、快速响应性、高精度性、通用性的特点。
(2) 基于arm平台,可以很好的嵌入uc/0sii实时操作系统,增强本系统的硬实时性和灵活性。
(3) 基于can总线控制,控制策略方便灵活,具有很高的可靠性,简化方案节约成本。
- 对TTCAN的分析(05-26)
- 嵌入式Win CE中CAN总线控制器的驱动设计与实现(05-01)
- μC/OS-II的多任务信息流与CAN总线驱动(07-11)
- 采用CAN总线实现DSP芯片程序的受控加载(11-08)
- 基于DSP的电动汽车CAN总线通讯技术设计(10-08)
- 基于DSP的CANopen通讯协议的实现(01-18)