Energid 机器人应用软件套件
1. 机器人控制与仿真的软件Actin
Energid的Actin的软件工具可以让你模拟和控制任何机器人系统。Actin是为根据美国宇航局开发的专利软件。 Actin协调一个或多个机器人的运动。开发人员只需要通过一种简单的语言提供机器手所需的运动。Actin则产生实时的算法,控制电机位置和速度。Actin可用于控制任何关节或机械手的类型,任何数目的自由度和分支。使机器人运动流畅,避免碰撞和关节限值,优化力量等。
Actin使用内置的控制软件或用户自己开发的控制软件可以提供强大的模拟功能。Actin输入可为CAD格式和SolidWorks的格式。可以捕获CAD模型的物理性质用于高保真的物理特性分析。通过丰富的建模和分析技术,Actin将问题解决在最初阶段从而节省时间和精力。Actin还可以评估一个机器人解决新的问题或应用于新的环境中的能力。
使用Actin,用户可以通过提供的库编译自己编写的源代码。使用Actin的可执行文件,或直接通过网络通信接口的可执行文件。这一切都很容易,Energid工程师会支持用户的工作。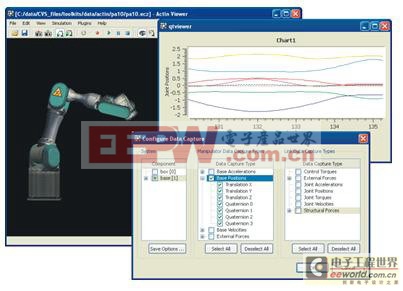
2. 机器人遥控软件,编解码器SMARTCODEC
在一块比纸牌小的板上,通过IP网络(如局域网或公共互联网),Energid的SmartCODEC捕获和极端地压缩视频的传输。它可为移动监控,工业机器人,民用机器人的应用提供可靠的远程机器人通信。
使用商业互联网和移动通信时,即使有网络带宽的限制和延迟,SmartCODEC仍能够自动适应突然的变化。它可以在60ms内调节比特率量,同时保持流畅的视频。通过闭环优化可以优先关键数据以响应用户接收端的优先事项,并补偿网络时延抖动。编码器的硬件可以和软件或硬件解码一起 使用。
SmartCODEC优势
?用于恶劣的战场通信环境的设计
?快速适应不同的网络带宽
?感知一致视频
?降低时延抖动
?基于H.264的核
?用于无线或有线网络
?解码器可作为单独的GUI或嵌入OCU
输入/输出
?视频分辨率:最高可达720x480,每秒30帧
?视频输入:NTSC
?音频输入:模拟
?以太网接口:RJ45
?电源:12V
3. 物体识别与跟踪,机械视觉, SelectinTM
Selectin是Energid的C + +的机器视觉工具软件。该工具包中提供了一个易于使用的前所未有的三维物体识别和跟踪技术。有了Selectin,开发人员可以用详细的CAD模型,对识别算法进行训练来构建物体识别系统。Selectin可以区分场景中的物体的类型,决定的姿势(即位置和方向)。它甚至可以跟踪有关节的物体,比如跟踪一把剪刀的刀片。
Selectin的基于C + +的物体识别与机器视觉的方法是灵活的,可扩展的。可以应用到许多不同类型的影像传感器,包括灰度,彩色,高光谱和激光雷达传感器。Selectin的方法的核心是在算法中能够权衡每步运行时间和精度。
SelectinC++面向对象的设计,包括空间分析组件和时间组件。空间组件用于分析每个单独的传感器的数据,时间组件与空间组件相结合,能够随时分析捕捉的数据集。物体识别技术使用物体的XML的CAD模型进行自动识别建立适合的算法。
?三维识别与跟踪——根据目标的CAD模型,跟踪目标的位置,方向和关节。
?速度—— 快速跟踪的实现是通过使用功能强大,低成本的PC图形卡进行信号处理。
?灵活性 ——使用基于XML的脚本语言。支持彩色,灰度,和激光雷达。
?代码重用—— 对于一个应用开发的程序算法可用于其他方面的应用。
应用
Selectin已被美国军队应用到手术工具的跟踪,被美国宇航局的用于机械视觉。该工具包的强大功能和灵活性,使得它有广泛的应用,包括以下:
物体识别——由物体的CAD模型能够识别到物体,使Selectin特别适合于某些类别的物体识别问题。复杂的结构,如卫星,汽车,飞机,都是可用Selectin识别的物体的例子。
视觉检测系统——历史上,检查系统大多数采用一维或二维传感器,但自动化技术和新制造工艺的最新进展,增加了对3D检测系统的需要。Selectin填补了这一实时应用要求的空白。
监控——Selectin可以用于监控特定物体相对其环境的改变。可用于国土安全或地方的区域监测。
视觉伺服——当结合Energid的Actin机器人控制工具包,Selecin可用于图像引导机器人控制。在环境中跟踪和识别物体并交互地操纵这些物体。此外,Selectin可以跟踪的机械手的位置。通过结合编码器跟踪的位置,机器人的操作能够达到更高的精度和鲁棒性。
- 基于DSP的机器人视觉伺服系统研究(04-17)
- 基于DSP的自动避障小车(04-05)
- 基于DSP的双足机器人运动控制系统设计(06-21)
- 用于日本震后救援的机器人技术(03-03)
- 基于TMS32OLF2407A的教育机器人硬件系统设计 (08-21)
- 基于DSP的覆冰机器人控制系统设计(02-13)