基于CAN总线的分布式嵌入式系统升级方案
制模块部分和待升级模块部分。 升级控制模块部分的工作过程为:向待升级模块发送升级命令,待接收到模块返回的确认标志后,再通过CAN应用层协议向待升级模块发送升级数据,升级完成后向待升级模块发送完成命令。 待升级模块工作流程如图4所示。分为引导程序部分和应用程序部分,这两部分内容在开发的时候是作为两个独立的工程项目来完成的。 图4 待升级模块工作流程 为确保在线升级的安全性,在Flash指定位置设置了一个程序完好标志。由于Flash的擦写是按照Page进行的,所以这个标志即使只有一位也需占用一个Page的大小。本系统中将标志设置在Flash最后一个Page。如果应用程序区没有空余的Page来写入该标志,就要考虑换用更大Flash容量的产品或者外扩存储器。程序完好标志在应用程序进入的时候写入,在接收到升级命令时擦除。若在引导程序中检测该标志不合法,就一直处于升级状态,直到最后收到升级成功命令为止。 程序跳转示例性跳转代码如下: typedef void (*pFunc)(void);//自定义函数指针数据类型 pFunc Jump_To_App;//定义一个指向应用程序的指针 Jump_To_App=(pFunc)0x08004000; Jump_To_App(); 需要注意的是,在程序执行跳转代码前,需要关闭中断响应,以避免发生不可预测的异常。同时,当程序跳转前,需要将堆栈指针设置到相应的程序区域。 结语 通过CAN总线对分布式嵌入式系统进行在线升级非常具有代表性,随着越来越多的芯片集成了丰富多样的片上通信外设(如以太端口、I2C总线等),使得嵌入式系统的升级也具有更多样式,甚至可以通过公用网络(如因特网、GPRS等)进行远程升级。 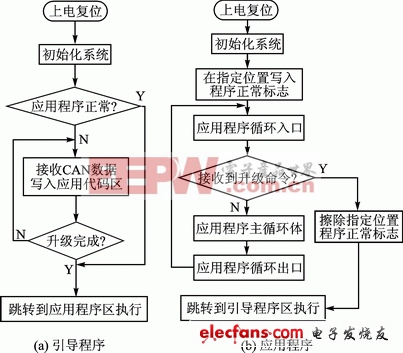
CAN总线 嵌入式系统 STM32F103VC 相关文章:
- 对TTCAN的分析(05-26)
- 嵌入式Win CE中CAN总线控制器的驱动设计与实现(05-01)
- μC/OS-II的多任务信息流与CAN总线驱动(07-11)
- 采用CAN总线实现DSP芯片程序的受控加载(11-08)
- 基于DSP的电动汽车CAN总线通讯技术设计(10-08)
- 基于DSP的CANopen通讯协议的实现(01-18)