微控制器驱动压电蜂鸣器的改进
时间:01-02
来源:互联网
点击:
本文主要针对如何用一只微控制器以大交流电压驱动一个压电蜂鸣器,它使用了一个四MOSFET的电路,与微控制器的两个I/O引脚连接(参考文献1)。以下是本文对这个电路的修改扩充,能节省下一只微控制器的I/O引脚。Q4的栅极连接到Q2的漏极,而不是第二个I/O引脚(图)。微处理器在I/O引脚施加一个高逻辑电平,使Q2导通,将Node A拉至低逻辑电平。这个动作打开Q3,关闭Q4。Node B上的电压变为15V,Q1关闭。压电元件上的电压现在为15V。
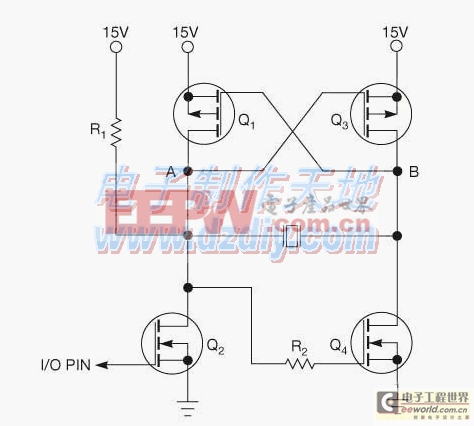
一只微控制器I/O引脚驱动这个电路,在压电蜂鸣器两端产生一个交流电压
然后,微控制器将I/O引脚切换为低,Q2关闭。Q1也关闭,因此Node A通过上拉电阻R1,缓慢地升至高逻辑电平。当Node A上的电压达到Q3和Q4管对构成的反相器开关阈值时,Q3快速关断,Q4快速导通。结果Node B上的低逻辑电平使Q1导通,并加快NodeA上电压的上升。现在,压电蜂鸣器上的15V电压是相反极性了。
R2削弱了Q4输出与输入之间的耦合,因为存在着压电元件。R2取值330Ω通常就足以抑制反馈所造成的高频振荡。如果R1阻值小,就会增加从电源拉出的功率。R1取值过大也会增加功耗,因为这样会延长晶体管的开关时间,增加有关的直通电流。R1的最佳值约为1kΩ。
此设计节省了一只I/O引脚,但付出的是增加功耗的代价。因此,电路的功耗要比前面设计实例所述电路高一个数量级。
- μC/OS-II下通用驱动框架的设计与实现(07-23)
- 微控制器省电管理方法(05-04)
- 基于DSP和Cygnal单片机的移动数据处理传输系统 (07-06)
- 从硅片工艺技术到嵌入式软件的全方位低功耗系统设计(01-01)
- 基于IAP的STM32程序更新技术(01-23)
- 发挥ARM Cortex-M3和M4微控制器最大作用的要诀(01-21)