前车门控制器解决方案
时间:01-10
来源:互联网
点击:
本文介绍了一种“总体分布、局部集中”式的轿车车门控制器设计方案,即以安森美半导体系统基础芯片NCV7462和功率驱动芯片NCV7707为核心设计前车门控制器的硬件电路,在满足前车门功能的同时对外部负载实现全面的保护。
随着汽车电子技术的不断发展,人们对汽车的操控性及舒适性需求不断提升高。汽车车身中的电子设备越来越多,尤其是前车门模块需要支持更多的功能,如电动后视镜折叠与调平、除霜器、中控门锁、玻璃升降器、车灯乃至其它更多的高级功能等。电子车门系统广义上分为两种架构:一种是集总式控制,通过一个中心模块控制和驱动所有车门中的每个负载,这样可降低整体成本,但增加了控制器的复杂性,而且控制过于集中、尺寸偏大,不利于安装、布线和散热。另一种采用分布式控制,每个车门内的负载由各自的ECU模块单独控制,也可由驾驶员侧ECU通过CAN/LIN总线控制。在这种方案中,通常两个前门ECU连接到CAN总线网络,分别与后面两个车门的ECU通过CAN或LIN总线通信。分布式方案结构简单,成本偏高,不过应用越来越广泛。
在分布式方案中,如门锁、后视镜、车窗升降器和辅助照明等主要的车门功能由分布在各个车门上的模块控制。而前车门模块除了自身门锁、车窗升降器功能外,还有外部后视镜功能的控制。在新一代汽车外部后视镜中,内置功能的数量大幅增加:转向灯/闪光灯、车门外部灯、除霜器、后视镜折叠与调节,甚至电动防眩目。系统设计师面临的挑战是如何在更小的体积实现更多的功能,以及成本要求。
前车门控制模块的整体设计
图1是功能较全面的车门控制器原理框图,主要由电源电路、电动车窗驱动电路、后视镜驱动电路、中央门锁驱动电路、车灯驱动电路、CAN/LIN总线接口电路、霍尔传感器输入电路及按键接口电路等部分组成。其中微控制器uC用于控制所有功率器件的开关动作,同时对系统状态进行定时监控,接收合适的故障信号,并通过车载网络CAN/LIN总线实现与中央车身控制器及其他车门控制器的故障信息和按键控制信息的交换,从而及时在用户界面上显示故障内容并对车门进行实时控制,确保了行车安全。
本系统的硬件结构框图如图2所示,功率级芯片NCV7462与NCV7707直接由电池供电,外部电路需要有反极性保护电路。NCV7462内置的LDO VR1向微处理器uC供电。微处理器uC通过SPI通信控制NCV7462与NCV7707,同时读取其状态信息。这些器件已提供了完善的故障检测及保护功能,因而避免了采用过多的分立元件,大大减小了模块的体积,并提高了模块的EMC(电磁兼容)特性。
1.反极性保护电路
为了保证驱动电流,NCV7462与NCV7707内部功率驱动器均通过VS连接至汽车12V电源线,因此要求配备外部反极性保护。NCV7462外部负载功率较小,通过串接二极管即可满足防反接要求,如图2中并联两只NRVBRA140T3G。二极管NRVBRA140T3G,,功耗0.55V,适用于续流和反极性保护。
而NCV7707负载功率大,若使用二极管,导通压降和导通电流较大,功耗大大增加,需采用导通阻抗更低的MOSFET。NCV7707内部配有一个电荷泵,通过引脚CHP控制MOSFET通断。
2.电源电路
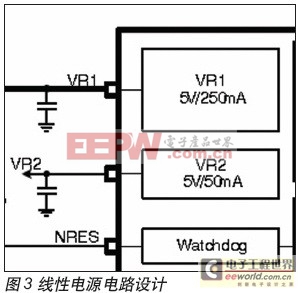
一般而言,BCM要求的输入电压在-0.5V至32V之间,输出电压为5V。随着汽车内的用电设备的增多,如果电池直接供电的设备静态电流不够低,而汽车连续停泊较长时间,车内蓄电池可能因为过度放电而使汽车无法重新启动,故BCM设计需要考虑静态电流。此外,汽车应用中可能会常常面对高温环境,所以要求电源提供过温保护。
3. CAN收发器电路
NCV7462内有一个高速CAN收发器模块,兼容ISO11898-2和ISO11898-5标准。该模块使用两组供电路径——
* 通过引脚VCC_CAN供电:在正常模式下,准备收发数据;
* 通过内部整流器供电:在待命模式和睡眠模式下,收发器监控总线远程唤醒。
为了保证CAN收发器正常工作,VCC_CAN外部需要一个2.2uF退藕电容。如果使用分裂终端(Split Termination)电压源,其VSPLIT(分裂终端电压)引脚可稳定闲置总线电平,进一步改善电磁辐射(EME)性能。
NUP2105L CAN总线保护器是一个27伏(V)的2双向瞬态电压抑制器(TVS),用以保护高速和容错CAN网中的收发器免受EMI和ESD的影响。此器件符合ISO 11898-2物理层规范,并且超过了抑制ESD和EMI的行业标准,非常适合用于数据传输速率高达1Mbit/sec的系统。
4.LIN收发器电路
内置的LIN收发器是LIN总线物理层与LIN协议控制器的界面,兼容LIN2.1与J2602规范。与CAN收发器不同,LIN由VS引脚唯一供电。
LIN收发器提供两种斜率模式,通过SPI位“LIN_SLOPE”配置。默认模式为正常斜率模式,收发器收发数据速度可达20kB,与LIN2.1规范一致。低斜率模式下,LIN总线上的信号转换率降低(上升沿与下降沿变长),可以降低EMC辐射。LIN总线最大速率降为10kB,该模式用于低速通信。
NUP1105L LIN总线保护器是一个27V的单个双向TVS,用以保护LIN或单线CAN网络中的收发器免受EMI和ESD的影响。此器件把抑制EMI和ESD的水平提高到SAE J2411和ISO 7637-3规范之上,这将提高网络在严酷的汽车和工业环境中的可靠性。
5.NCV7462输出级
NCV7462 OUT_HS为高边,可驱动5W灯泡;OUT1-4为高边开关,可用于驱动LED或按键开关。OUT_HS与OUT1-4一样具有各种保护功能,包括过流保护和电流限值、欠载检测、热保护和VS欠压、过压保护。此外,OUT_HS可以配置旁路过流保护模式(过流自恢复),防止负载要求较大初始驱动电流,例如白帜灯泡的冲击电流。当OUT_HS过流时间超过Tblank_OLD_OUT_HS(typ.120us),SPI状态位将被锁定,同时输出被关断。如果SPI控制位“OUT_HS_OCR”设为高。在时间Tflt_OCR(typ.400us)后,SPI状态位“OUT_HS_OC”没有变化,OUT_HS将自动再生。若过流持续存在,OUT_HS进入周期振荡,高电平约为120us,低电平约为400uS。当负载被认为稳定(例如,灯泡变热),微处理器uC软件将关闭自动恢复功能。
6.电动车窗驱动电路
电动车窗系统的每个车门都有一个车窗玻璃升降机构,采用直流永磁电机来驱动。电机的尺寸非常小,可以安装在车门里面,并且带有一套减速机构,用来增加输出扭矩、减小输出转速。电机转动方向(即车窗的上下移动)通过改变输入电压的极性来实现,车窗升降速度取决于输入电压的大小。电动车窗驱动电路如图4所示。
(1)车窗升降继电器驱动电路
由于继电器比智能H桥芯片的成本低,目前仍在车窗驱动电路中广泛应用。车窗控制系统由微控制芯片uC通过SPI通信控制NCV7462集成的2路低边驱动(LS1/2)驱动继电器,再由继电器组成的H桥来操纵车窗上升或下降。低边驱动LS1/2的通态电阻典型值3.3Ω,驱动电流可达0.5A,足以驱动继电器可靠动作。如果驱动电流超过过流限值时间Tfilt_OLD_LS1/2(典型值 60us),驱动关闭,同时锁定SPI状态寄存器。只有当相应SPI标志位被读取和清除,才可以再次使能。
(2)车窗升降电流采样设计
由于车窗升降电机轴负载转矩变化率对障碍物是非常敏感的,其阈值可以作为障碍物检测的判断指标。根据直流电机负载转矩与电枢电流之间的线性关系,本文采用测量电枢电流来间接得到电机负载转矩的测量方案。采样原理如图4所示。
随着汽车电子技术的不断发展,人们对汽车的操控性及舒适性需求不断提升高。汽车车身中的电子设备越来越多,尤其是前车门模块需要支持更多的功能,如电动后视镜折叠与调平、除霜器、中控门锁、玻璃升降器、车灯乃至其它更多的高级功能等。电子车门系统广义上分为两种架构:一种是集总式控制,通过一个中心模块控制和驱动所有车门中的每个负载,这样可降低整体成本,但增加了控制器的复杂性,而且控制过于集中、尺寸偏大,不利于安装、布线和散热。另一种采用分布式控制,每个车门内的负载由各自的ECU模块单独控制,也可由驾驶员侧ECU通过CAN/LIN总线控制。在这种方案中,通常两个前门ECU连接到CAN总线网络,分别与后面两个车门的ECU通过CAN或LIN总线通信。分布式方案结构简单,成本偏高,不过应用越来越广泛。
在分布式方案中,如门锁、后视镜、车窗升降器和辅助照明等主要的车门功能由分布在各个车门上的模块控制。而前车门模块除了自身门锁、车窗升降器功能外,还有外部后视镜功能的控制。在新一代汽车外部后视镜中,内置功能的数量大幅增加:转向灯/闪光灯、车门外部灯、除霜器、后视镜折叠与调节,甚至电动防眩目。系统设计师面临的挑战是如何在更小的体积实现更多的功能,以及成本要求。
前车门控制模块的整体设计
图1是功能较全面的车门控制器原理框图,主要由电源电路、电动车窗驱动电路、后视镜驱动电路、中央门锁驱动电路、车灯驱动电路、CAN/LIN总线接口电路、霍尔传感器输入电路及按键接口电路等部分组成。其中微控制器uC用于控制所有功率器件的开关动作,同时对系统状态进行定时监控,接收合适的故障信号,并通过车载网络CAN/LIN总线实现与中央车身控制器及其他车门控制器的故障信息和按键控制信息的交换,从而及时在用户界面上显示故障内容并对车门进行实时控制,确保了行车安全。

本系统的硬件结构框图如图2所示,功率级芯片NCV7462与NCV7707直接由电池供电,外部电路需要有反极性保护电路。NCV7462内置的LDO VR1向微处理器uC供电。微处理器uC通过SPI通信控制NCV7462与NCV7707,同时读取其状态信息。这些器件已提供了完善的故障检测及保护功能,因而避免了采用过多的分立元件,大大减小了模块的体积,并提高了模块的EMC(电磁兼容)特性。

1.反极性保护电路
为了保证驱动电流,NCV7462与NCV7707内部功率驱动器均通过VS连接至汽车12V电源线,因此要求配备外部反极性保护。NCV7462外部负载功率较小,通过串接二极管即可满足防反接要求,如图2中并联两只NRVBRA140T3G。二极管NRVBRA140T3G,,功耗0.55V,适用于续流和反极性保护。
而NCV7707负载功率大,若使用二极管,导通压降和导通电流较大,功耗大大增加,需采用导通阻抗更低的MOSFET。NCV7707内部配有一个电荷泵,通过引脚CHP控制MOSFET通断。
2.电源电路
一般而言,BCM要求的输入电压在-0.5V至32V之间,输出电压为5V。随着汽车内的用电设备的增多,如果电池直接供电的设备静态电流不够低,而汽车连续停泊较长时间,车内蓄电池可能因为过度放电而使汽车无法重新启动,故BCM设计需要考虑静态电流。此外,汽车应用中可能会常常面对高温环境,所以要求电源提供过温保护。
3. CAN收发器电路
NCV7462内有一个高速CAN收发器模块,兼容ISO11898-2和ISO11898-5标准。该模块使用两组供电路径——
* 通过引脚VCC_CAN供电:在正常模式下,准备收发数据;
* 通过内部整流器供电:在待命模式和睡眠模式下,收发器监控总线远程唤醒。
为了保证CAN收发器正常工作,VCC_CAN外部需要一个2.2uF退藕电容。如果使用分裂终端(Split Termination)电压源,其VSPLIT(分裂终端电压)引脚可稳定闲置总线电平,进一步改善电磁辐射(EME)性能。
NUP2105L CAN总线保护器是一个27伏(V)的2双向瞬态电压抑制器(TVS),用以保护高速和容错CAN网中的收发器免受EMI和ESD的影响。此器件符合ISO 11898-2物理层规范,并且超过了抑制ESD和EMI的行业标准,非常适合用于数据传输速率高达1Mbit/sec的系统。
4.LIN收发器电路
内置的LIN收发器是LIN总线物理层与LIN协议控制器的界面,兼容LIN2.1与J2602规范。与CAN收发器不同,LIN由VS引脚唯一供电。
LIN收发器提供两种斜率模式,通过SPI位“LIN_SLOPE”配置。默认模式为正常斜率模式,收发器收发数据速度可达20kB,与LIN2.1规范一致。低斜率模式下,LIN总线上的信号转换率降低(上升沿与下降沿变长),可以降低EMC辐射。LIN总线最大速率降为10kB,该模式用于低速通信。
NUP1105L LIN总线保护器是一个27V的单个双向TVS,用以保护LIN或单线CAN网络中的收发器免受EMI和ESD的影响。此器件把抑制EMI和ESD的水平提高到SAE J2411和ISO 7637-3规范之上,这将提高网络在严酷的汽车和工业环境中的可靠性。
5.NCV7462输出级
NCV7462 OUT_HS为高边,可驱动5W灯泡;OUT1-4为高边开关,可用于驱动LED或按键开关。OUT_HS与OUT1-4一样具有各种保护功能,包括过流保护和电流限值、欠载检测、热保护和VS欠压、过压保护。此外,OUT_HS可以配置旁路过流保护模式(过流自恢复),防止负载要求较大初始驱动电流,例如白帜灯泡的冲击电流。当OUT_HS过流时间超过Tblank_OLD_OUT_HS(typ.120us),SPI状态位将被锁定,同时输出被关断。如果SPI控制位“OUT_HS_OCR”设为高。在时间Tflt_OCR(typ.400us)后,SPI状态位“OUT_HS_OC”没有变化,OUT_HS将自动再生。若过流持续存在,OUT_HS进入周期振荡,高电平约为120us,低电平约为400uS。当负载被认为稳定(例如,灯泡变热),微处理器uC软件将关闭自动恢复功能。
6.电动车窗驱动电路
电动车窗系统的每个车门都有一个车窗玻璃升降机构,采用直流永磁电机来驱动。电机的尺寸非常小,可以安装在车门里面,并且带有一套减速机构,用来增加输出扭矩、减小输出转速。电机转动方向(即车窗的上下移动)通过改变输入电压的极性来实现,车窗升降速度取决于输入电压的大小。电动车窗驱动电路如图4所示。
(1)车窗升降继电器驱动电路
由于继电器比智能H桥芯片的成本低,目前仍在车窗驱动电路中广泛应用。车窗控制系统由微控制芯片uC通过SPI通信控制NCV7462集成的2路低边驱动(LS1/2)驱动继电器,再由继电器组成的H桥来操纵车窗上升或下降。低边驱动LS1/2的通态电阻典型值3.3Ω,驱动电流可达0.5A,足以驱动继电器可靠动作。如果驱动电流超过过流限值时间Tfilt_OLD_LS1/2(典型值 60us),驱动关闭,同时锁定SPI状态寄存器。只有当相应SPI标志位被读取和清除,才可以再次使能。
(2)车窗升降电流采样设计
由于车窗升降电机轴负载转矩变化率对障碍物是非常敏感的,其阈值可以作为障碍物检测的判断指标。根据直流电机负载转矩与电枢电流之间的线性关系,本文采用测量电枢电流来间接得到电机负载转矩的测量方案。采样原理如图4所示。
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)