仿生蜘蛛机器人的设计与实现
1 机器人本体设计
生物界蜘蛛的特点是拥有8条腿,在行走时,总会有4条腿着地,用以保持自身的平衡。其生物行为除了行走,还有转弯、攻击、趴下等,每个行为作业都靠脚部的运动来实现,因此对腿部的灵活度要求较高;其次,要使机器人具有生物的特性,需对外界的刺激做出正确的判断和及时的响应,所以感觉器官的模拟也至关重要。
1.1 躯干设计
考虑到蜘蛛机器人躯干部位对灵活度基本没有要求,无需搭建活动关节,且整机控制器不宜受到关节活动干扰,于是将整机控制器作为躯干部位,完全符合要求,并且便于操控。控制器采用16位高性能低功耗的AVR单片机,频率最高为16 MHz,运算速度最快为16 MI·s-1。对于小型仿生蜘蛛机器人的运动解算和规划,该运算能力足以满足控制和在线规划的运算要求。
1.2 腿部设计
腿部设计是实现蜘蛛机器人功能的关键。机器人设计有6足,行走时依靠两两间隔的3条腿构成稳定的三角形支撑地板,每只腿设计为3个关节,即具有3个自由度。并且将轴向分布成x轴、y轴、z轴,实现前后、左右、上下的三维活动空间。选取18个Robotis公司的Dynamixel AX-12+机器人专用伺服电机充当肢体关节。
Dynamixel AX-12+是机器人专用的伺服电机,充当机器人的关节。首先,Dynamixel系列机器人驱动器是一个较流行的模块化驱动器,由齿轮减速器、精密直流电机和具有串联功能的电路板封装组成。尽管它体积小巧紧凑,但它可以产生较大的扭矩,加上高品质材料制造并具有一定的强度,可以抵御一定外部冲击。同时它还是双向的伺服控制系统,具有回授功能,且具有检测内部温度功能,例如改变内部温度和供电电压。具有报警功能:当内部温度,扭矩,供电电压等超过额定范围时,它主动反馈这种情况并闪动LED灯或关闭舵机扭矩来通知用户,达到报警效果。
Dynamixel AX-12+的位置和速度控制精度可达1 024级(0~1 023),关节型舵机对应最大转角为300℃,控制角度分辨率为300/1024= 0.29°/步。如图1所示,位置值0是0°,位置值512是150°,位置值1 023是300°等。通信波特率为7 343 bif·s-1~1 Mbit·s-1,命令信号是数字型数据包,通信协议类型为半双工异步串口通信,不同舵机之间通过唯一的ID进行识别,最大有254个ID。每个Dynamixel AX-12+舵机都有一个控制表存储舵机的状态和控制信息,这个控制表由一个RAM区和E2PROM区组成,对舵机的控制实际是通过向其控制表中写指令;而要获取舵机当前状态实际就是读取控制表相应的值。

1.3 感觉器官设计
设计蜘蛛机器人的感官系统时,如果每个感官对应一个传感器模块,那么对蜘蛛机器人关节活动便会增加许多牵绊与阻碍。于是,设计采用1个集超声测距传感器、声音检测传感器、亮度传感器、温度传感器和红外线接收器于一身的Robotis公司的DynamixelAX-S1模块来充当机器人的感官系统。并且AX-S1与AX-12+机器人专用伺服电机在通信方式上一致,以便于通信和控制器统一管理;在机械上结构相同,外观上也可以达到统一、美观。
1.4 本体结构
根据生物蜘蛛外形,设计总体结构为:以控制器作为身体部位,连接6足,将传感器模块作为头部。选取合适的连接件,最终拼装连接得到小型仿生蜘蛛机器人样机,如图2所示。
2 机器人行为设计
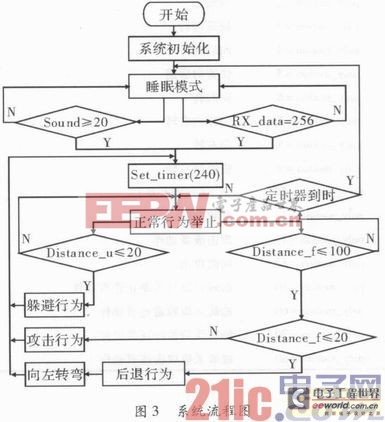
控制系统采用模块化设计,将整个工作流程划分为:系统初始化、启动模式、生物行为等。图3是系统流程图。
2.1 系统初始化
机器人的初始化需要做两部分工作,一是初始化每个伺服器的功能模式,并将每个伺服器切换到位置控制状态;二是初始化机器人的初始动作,也就是初始状态,将机器人复位。
2.1.1 伺服器初始化
初始化伺服器的功能模式是因为AX-12+具有多种功能,如果没有将其初始化,它将记忆之前的设置,按照之前的设置模式完成此次控制,则AX-12+不会正确工作。AX-12+的每个功能对应地址[ADDRESS]的固有号码,可以通过选择地址的方法来控制各个功能。例如:要设定AX-12+的位置控制状态,首先要选定所要设置伺服器的ID。ID=1的伺服器,令address=8,则进入其运转模式更改,设置mode变量,mode只有两种状态:mode=0是无线旋转模式,mode=1 023是正常位置控制状态。此处设计所用的18个伺服器被用作蜘蛛机器人的6足,其位置控制状态应该设置为mode=1 023,且每一个伺服器都要初始化为此状态。
仿生蜘蛛机器 Dynamixel AX-12 舵机 相关文章:
- 基于1553B总线的航天大功率电动舵机控制器设计(12-21)
- 51单片机舵机控制程序(12-02)
- PIC16F877A一路舵机参数化控制程序(12-02)
- 舵机速度控制原理细解(12-01)
- 51单片机分时控制8路舵机程序(12-01)
- 舵机复控的单片机程序(12-01)