MEMS可否取代光纤陀螺仪技术?
时间:01-21
来源:互联网
点击:
表2:FOG规格(uFors-6U) 
双天线航向更新具有良好的精确度,但易受多路径影响。因此,双天线航向更新仅在开放天空环境中是可靠的。对于来自GNSS接收器的位置和速度预测,情况同样如此,也从SBAS受益。
来自磁力计的航向预测可能由于在校准期间的垂直可观察性不佳,而受到较大倾斜角的影响。磁力计在含铁物质周围也可能不精确,例如在其他车辆旁边行驶时。因此,磁力计用于在GNSS不可用时帮助初始化系统,或在GNSS长时间中断时(例如20分钟)帮助减小航向漂移。
气压计用于在GNSS不可用或不精确时帮助获取高度读数。速度更新用于在没有GNSS更新的情况下防止速度漂移,特别是在沿航迹方向。这些速度更新也可帮助减少解决方案的位置不确定性,这有助于抑制不准确的GNSS位置更新。整个导航软件的设计目的是在任何GNSS条件下提供精确结果。
导航测试
为了正确比较两个系统,我们设计了三个系统级导航基准测试:
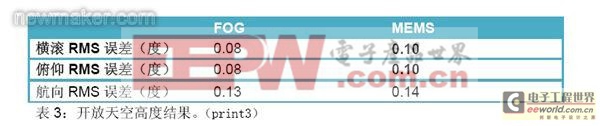
* 在具有良好GNSS信号的开放天空环境下评估横滚、俯仰和航向的精确性。
* GNSS多路径场景,例如在城市中心区,由于存在高层建筑,GNSS解决方案质量可能不好。本测试的目的是比较滤波位置性能,它也会显示高度和速度误差。
* 独立INS性能测试,旨在评估INS位置漂移,也代表速度和高度性能。
开放天空高度结果
在GPS可用且位于多个卫星的直射范围内的情况下,两个系统的定位和速度结果是相似的。高度角(横滚、俯仰和航向)是我们比较的主要导航参数,因为它们在很大程度上是由陀螺仪性能决定的。
不良信号GNSS定位结果
下一个测试的目标是在存在GNSS多路径的情况下比较两个系统。行驶轨迹位于卡尔加里市的中心城区,包括一些很窄的小巷,车行缓慢,同时周围布满高层建筑。
现在,性能测试重点包括了定位结果,因为在缺少高质量GNSS测量的情况下,陀螺仪可能对位置性能产生很大影响。此测试结果显示两个系统的性能相当。但是,FOG系统高出大约20%至30%。
图2显示了独立GPS解决方案的示意图。在对复杂的中心城区行驶轨迹进行导航时,本测试使用的高精度GPS接收器遇到了严重的信号反射。独立GPS解决方案的误差多达100米。

图2:此图显示有多路径干扰的独立GPS解决方案结果

图3:FOG/GPS集成解决方案(FOG+GPS红色,独立GPS蓝色)

图4:MEMS/GPS集成解决方案(MEMS + GPS绿色,独立GPS蓝色)

图5:MEMS/GPS/OBDII集成解决方案(MEMS+GPS+OBDII绿色,独立GPS蓝色)

图6:带有OBDII的MEMS(绿色)与没有OBDII的FOG(红色)比较。独立GPS为蓝色。
两个系统之间的最后一项比较是独立INS导航测试。系统使用开放天空GNSS更新进行融合。然后断开两个系统的天线连接,持续4.5分钟,位置漂移用作性能指标。在此时间内行驶的距离约为5,500米。
图7显示了整个轨迹。蓝色直线从右下方延伸至左上方,在右下方GPS断开连接,在左上方GPS重新连接。

图7:独立INS测试路径

图8:独立FOG漂移

图9:独立MEMS漂移

图10:带有OBDII的MEMS系统的漂移
FOG和MEMS两者相比非常接近,特别是现在MEMS的性能正在接近FOG战术级性能水平。FOG仍然在性能上具有优势,但其成本却比MEMS高出10倍。如果可以使用GNSS,而且应用的目的是在开放天空环境中运行,则MEMS可以取代一些低端FOG。如果应用的目的是在信号不良的GNSS环境中使用,MEMS也可以取代一些FOG 系统,但性能要低20%至30%。
在独立INS性能方面,FOG仍然具有优势,但如果应用能够接收车辆或平台速度更新,则MEMS系统可以达到与独立FOG系统相同的水平。随着MEMS技术的持续进步,以及其他传感器(例如OBDII)的辅助,MEMS取代FOG技术可能在不久的将来实现。(end)
- 基于DSP的数字式MEMS加速度传感器的设计与应用(04-17)
- 基于ARM-Linux的微惯性单元数据采集与处理(05-15)
- DSP在MEMS陀螺仪信号处理平台的应用(01-06)
- 基于DSP的MEMS陀螺仪信号处理平台系统的设计(04-21)
- 基于DSP的数字式MEMS加速度传感器ADXL203的系统设计与应用(07-06)
- 集成晶体的可编程时钟可提供多种设计优势而无性能折衷(07-10)