松下PLC通过MODBUS总线控制LEXIUM 05伺服
时间:02-10
来源:互联网
点击:
1,则把寄存器与CRC-16常数进行异或,否则如果LSB为零,则无需进行异或。重复上述的由高至低的移位8次,第一个8bit数据处理完毕,用此时寄存器的值与下一个8bit数据异或并进行如前一样的8次移位。所有的字符处理完成后CRC寄存器内的值即为最终的CRC值。CRC添加到消息中时,先加入低字节,然后高字节。
1.3 链路特征
MODBUS标准的物理层可以采用RS-232串行通信方式,但在长距离通信中常采用RS-422或RS-485代替。在多点通信情况下只采用RS-485方式,所以RTU模式下的MODBUS系统采用屏蔽双绞线,通信距离可达1000m。一条总线上最多可配置31个从站设备。传输线上的信息交换是半双工的,即同时只能有一台设备允许发送信息,主站在发送下一条指令之前等待从站回应,从而避免了线路的冲突。
RTU模式的传输格式是1个数据位,2个停止位,没有奇偶校验位。通信数据安全由控制参数CRC-16码保证。RTU接收设备依靠接收字符间经过的时间判断一帧的开始,如果经过3个半的字符时间后仍然没有新的字符或者没有完成帧,接收设备就会放弃该帧,并设下一个字符为新一帧的开始。
2 松下PLC MODBUS控制的实现
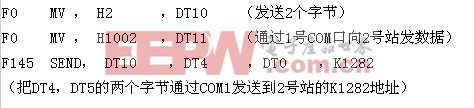
松下PLC支持modbus协议,只需要在选项、PLC系统寄存器设置、COM1口设置中站号设成1,通讯模式设为MODBUS RTU,通讯速率和通讯格式与05驱动器的设置保持一致。设置完成后可通过F145 SEND指令实现与05的通讯。
例:
3 施耐德05A伺服驱动器的配置
首先过驱动器的HMI面板把控制方式设为modbus模式,把波特率、通讯格式设置成与PLC一致。



- 嵌入式系统硬件平台的软件PLC实现方法(04-12)
- 利用数字信号控制器实现稳健的PLC通信(05-02)
- 基于Linux系统的软PLC设计(07-19)
- 基于VxWorks的嵌入式实时PLC设计(01-08)
- 基于AT89C51单片机的微型可编程控制器(04-23)
- 基于DSP的光纤监控网络系统方案(08-03)