基于VB的计算机与软起动器的通讯
m.inbuffersize=1024 ;缓冲区大小
comm.inputlen=0 ;清空接收缓冲区
comm.rtsenable=false ;无须硬件握手
comm.portopen=true ;打开通讯口
end sub
值得注意的是,通讯协议中规定以奇偶校验位作为地址选择标志,下面一发送读状态指令为例。
读软起动器状态字
private sub readstatusword() ;读状态字子程序
mscomm1.output=command_s ;发送第一个字节(地址及快速指令读状态)
mscomm1.settings=“9600,s,8,1” ;将奇偶校验位设 ;为0,即接收响应状态
mscomm1.output=outdatabyte_l;发送低8位
delay(10) ;延时10ms
call recieverespond(y) ;接收从机握手信 ;号(y为接收状态)
if y《》0 then call dealerror ;如果握手信号不 ;正确,调用故障处理子程序
mscomm1.output=outdatabyte_h;如果握手信号正 ;确,发送高8位
mscomm1.output= command_s+ outdatabyte_l+ outdatabyte_h+fh ;发送校验码
call recieverespond(y) ;接收从机握手信号
if y《》0 then call dealerror ;如果握手信号不正 ;确,调用故障处理子程序
callrecievedata ;如果正确,调用接收状态字子程序
call verifys1 ;接收并验证校验和
end sub
收到的状态字为二进制双字节(dl,dh),每一位含义如表5和表6所示。
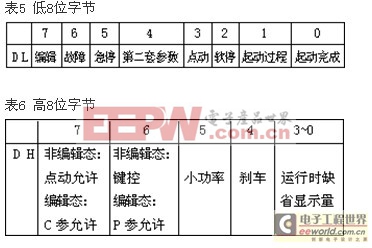
上位机收到状态字后,判断该机的状态,进而根据状态字和工况要求,对该机进行适当的远程控制。
5 结束语
strc软起动器可靠性高,中文液晶显示,容易操作,易于实现与计算机的联网,本文的程序是用vb6.0编写的简单的单机通讯程序,已调试成功,用于软起动器的上位机控制,在实践中应用正常。在此基础上,可以用vb、vc++等高级语言编程,将监控和管理报表与其溶为一体,做出更灵活,功能更强大的控制软件,进而实现对电机灵活而可靠的控制。
- 软起动器在城市雨水排污站中的应用(02-17)
- 现场总线在电机软起动器中的应用(01-23)
- 一种基于80C196KC的电子软起动器的软硬件实现(04-05)
- 基于Intel96的感应电动机起动器(02-25)
- 基于DSP的新型弹载控制计算机(04-05)
- Linux系统计算机死机的故障原因(05-08)