三轴台式工业机器人通用控制软件设计
在哪块区域,接着在细分,直到加工点及环境足以被表示出来为止。该方法在对无加工点和无加工工件的区域内不进行细分,大大节省了数据消耗,并且有针对性的对有加工点及加工工件的位置进行细分,提高了加工精度。为了在工件加工时能够更精确地表示加工位置,该控制软件在环境表示上所采用的是改进后的栅格法。

在环境表示的代码实现上采用链表的形式。环境单位结点的构建采用结构体的形式,其主要包括子结点地址、父结点地址和权值等。不同的权值代表着不同的含义,可表示存在加工点区域、靠近加工点区域、加工工件非加工点部分及其他区域,它是实行路径规划实现的引领者,在下节路径规划当中将详细介绍。环境单位结点的代码如下:

一旦区域划分完毕,将需要一值予以表示其加工点的位置。采用结构体的形式予以表示,包括X,Y,Z三个坐标,表示其相对于所在结点空间的坐标。该结构体属于环境单位结点的一部分,具体代码如下:
Struct News
{int x;int y;int z;};
每一个环境单位结点都拥有自己的一个ID号,即该环境单位的大小及位置,具体代码如下:
Struct Size
{int y;int z;int x;int Size;};
x,y,z分别是区域空间内该坐标轴上的最小值,Size表示该立方体区域的边长。
4.2权值寻找
在路径规划上,采用权值寻找法。对每一个环境节点都进行一个权值的赋予,给予结点不同的优先级,权值越低,优先级越高,用于在路径寻找中找到最优路径。
例如,现有4个子节点A,B,C,D,给予A结点的权值为100,B结点的权值为80,C结点的权值为50,D结点的权值为10.现在在路径规划寻找最优路径时,直接先寻找到D结点,然后继续寻找下去,若出现多个优先级相同的结点时,则分而寻之,到寻找完毕之后,再进行最优路径选取,可采用权值之和最小者优先的方法等[6].权值赋予的优先级按由高到低的顺序排列为:存在加工点,靠近加工点,加工工件非加工点部分,其他区域。
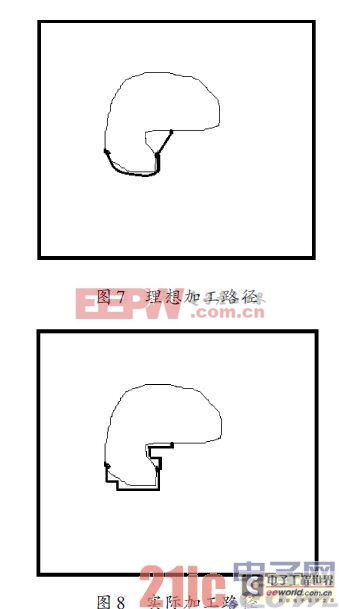
实验结果表明,采用上述路径规划选定的实际加工路径与理想加工路径依然存在着一定的差距。图7为理想加工路径,图8为实际加工路径。
5总结
本文通用控制软件是在三轴台式工业机器人的基础上,以SmartPAC运动控制器为核心,通过改进后的栅格法进行模型建立,利用权值寻找法进行树的遍历寻找出一条最优路径作为加工路径。经实验表明,该软件基本达到轴式机器人定位要求,能实现简单的路径规划,具备一定的通用性。针对大批量工业加工而言,软件在加工工件的首次模型实现与路径规划上时间开销较大,相比人为设定加工路径要简单、高效、便捷。
- 可编程机器人将替代码农 可改装来自工业机器人(06-04)
- 贴砖工程自动化 建筑机器人可提高4倍生产效率(12-20)
- 工业机器人在中国:由低端开始,向高端进发(12-20)
- 伺服在工业机器人技术中的运用(12-19)
- 实现高效生产的工业机器人(12-20)
- 工业机器人在缝纫机铸件加工中的应用(12-20)