压力筛DCS控制系统的改进
2 压力筛的改进控制方案
改进压力筛控制方案如图5所示。与常规控制方案(见图4)相比,改进控制方案是在原程序基础上增加了低选环节和堵网预处理过程。如图5所示,当进出口浆的差压超过正常工作时的HLT(1~4 N/cm2),但又低于完全堵网时的差压HHLT,即压力筛开始出现堵网的趋势时,如果对其进行一定处理,完全可以扭转这种趋势,避免压力筛堵网情况的出现。本方案就是基于这种理论设计的。其中,HLT为正常工作时的浆料压力上限。

图4 改进前的压力筛控制图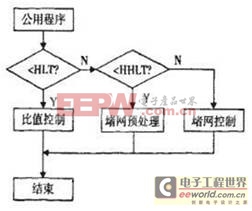
图5 改进后的压力筛控制图
(1)比值控制
当压力差低于正常工作的设定值HLT时,进、出口桨的压差一般很小,通常在1~4 N/c㎡。在这种情况下,压力筛进桨管道上的流量计与出浆管道上的阀门组成压力筛进浆流量控制回路,尾浆流量一定的情况下,控制良浆出口管线上的阀门,也就相当于控制了进浆流量。因为正常情况下,压力筛是不加冲洗水的,进浆=良浆+尾浆。正是利用了这种间接控制,省去了进浆管道上的阀门,节省了经济开支,同时达到了很好的控制品质。尾浆管道上的流量计与阀门组成排渣流量控制回路,并与良浆成正比关系。正常情况下,压力筛就在这种方式下工作。
(2)堵网预处理
考虑到工厂中高压反冲洗水的难以实现,本方案将反冲洗水改为普通高压水,做稀释水之用。此处,将稀释水加在压力筛的进浆管道上,要求水压比进浆的压力高5 N/c㎡以上即可,大大降低了对反冲洗水压力的要求。
当检测到的压力差大于HLT,但又同时小于堵网设定值HHLT时,DCS系统将作出如下的动作:在良浆管道阀门原有开度值的基础上,以较大的递减量关小此阀门,减小良浆产量;同时,以较大的递增量开大尾桨出口管道上的阀门,提高排渣率,增加尾浆流量;打开稀释水管道上的阀门,向压力筛注水,降低浆浓。这样,在较低的浆浓和较大的排渣率条件下,网孔的堵塞状况会得到良好的改善,最终很快消除堵塞,进出口浆的压差随之降低,然后关闭冲水阀,使系统自动回到比值控制下。
一般情况下,压力筛的异常堵网都会在这种情况下克服。其动作与堵网顺控相比,幅度大大降低,而且浆泵始终处于开状态,保证了系统连续平稳运行,避免了停车事件的频繁发生,大大改善了控制质量。
(3)堵网处理
压力筛在正常工作情况下,设在进、出口管道上的差压变送器检测到的压力差在一般情况下是很小的,其数值在1~4 N/c㎡之间;一旦压力筛出现堵网,则进、出口差压变送器枪测到的压差会急剧攀升。此时若不作适当的处理,压力筛的筛网将继续堵塞,良浆产量骤降,影响正常的工业生产;同时,压力筛和高浓除渣器以及管道内的压力将不断增加,可能损坏设备甚至产生严重的人身伤害。因此,一旦差压变送器检测到的压力差达到某一设定值(如30 N/c㎡),DCS将认为此时压力筛已经处于堵网状态,将及时做出处理,排除故障,保证正常的工业生产。其数学表达式如下所示:
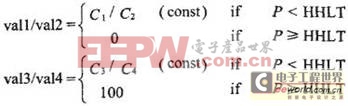
式中,val1,val2,val3,val4分别代表压力筛进浆管道的调节阀阀位、良浆出口管道上的调节阀阀位、尾浆管道上的调节阀阀位和反冲洗水阀的阀位;C1、 C2、C3、C4分别对应正常工况下的阀位值,范围在0~100之间。其数值可根据压力筛的排渣率等要求,由工艺人员进行设置。HLT为事先设定的堵网压力值。P为压力筛进浆口与良浆出口管道上的压差检测值。
堵网顺控的控制思路如下:一旦进出浆管道上压力差过大,超过设定值,即判断为发生堵网,此时,DCS及时做出反应,停止进浆泵,保证压力筛的浆压不会继续攀升,防止筛网堵塞状况的加剧;关闭良浆管道上的阀门(此时良浆量已经很小),防止大量的水进入良浆管道,降低后续浆池中储存浆料的浓度;同时,防止堵网排除恢复正常生产之后,大量的渣浆进入良浆管道,影响纸浆的质量;将尾浆管道上的阀门全开,压力筛内余存的浆料从尾浆管道排出,后续工段还可以对它进行再处理,防止纤维流失;打开高压冲洗水阀(高压冲洗水一般加在良浆出口处),利用高压反冲筛网,排除堵网。主要是为了防止浆流量发生剧烈变化时,例如纸浆中纸屑、塑料等杂质含量的突然增加导致的堵网,预处理环节一时处理不过来,从而使进出日浆压差剧增导致堵网。
(4)排渣率控制
由排渣率公式(排渣率=粗浆量/进浆量)可知,只要对进浆流量和尾浆流量进行有效控制,就可以保证排渣率的稳定。因此,在改进控制方案中分别设置了进浆流量控制单元和尾浆流量控制单元。压力筛进浆管道上的流量计与出浆管道上的阀门组成压力筛进浆流量控制回路(见图6)。尾浆流量一定的情况下,控制良浆出口管线上的阀门,也就相当于控制了其进浆流量。因为正常情况下,进浆流量基木上是良浆流量与尾浆流量之和。尾浆管道上的流量计与阀门组成尾桨流量控制间路。
- 如何实现西门子S7-300 PLC与DCS控制系统的通信(09-12)
- DCS控制系统中的三种总线的通讯协议(09-12)
- IRC接口型继电器在PLC和DCS控制系统中的应用(03-14)
- 现场总线在电厂中应用应注意的问题(12-04)
- 基于MSP430的温度控制系统的设计与实现(01-03)
- 喂线机自动控制系统的研究与开发(12-20)