一种小车红外光循迹电路的设计
循迹电路设计
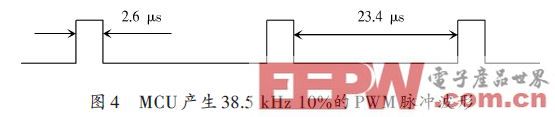
3.1 低占空比脉冲波38.5 kHz/10%~20%脉冲波形成
遵循2.4节设计原则,第一种方法采用具有PWM外设的单片机启动PWM 模块产生脉冲波,不建议用纯软件产生该脉冲波。产生的波形应满足图4所示的时间参数要求。
第二种方法采用有源晶振(可省去振荡电路,简化电路设计)1.544 MHz(经2 级二分频)或11.059 2 MHz(经5 级二分频)后,分别产生386 kHz 或345.6 kHz 方波,后接十进制计数/分配器或九进制计数/分配器,从Q0~Q7任意引脚即可产生38.6 kHz/10%或38.4 kHz/11%占空比的脉冲波(脉冲频率均误差0.1 kHz,占空比一个是10%,一个是11%)。电路图如图5所示。

3.2 红外光发射控制电路设计
小车红外光循迹电路采用8路已经可以满足较复杂竞赛的要求。按照设计原则2.6,矩形脉冲最好不要同时驱动光发射电路,需要一路一路轮流发送并保持一段时间。
采用两个74HC4081 四与门控制脉冲信号传送给ULN2803八反向OC驱动器驱动红外发光二极管,每一路可输出500 mA.74HC4081 与门的另一个输入端接MCU控制选通。如图6所示。
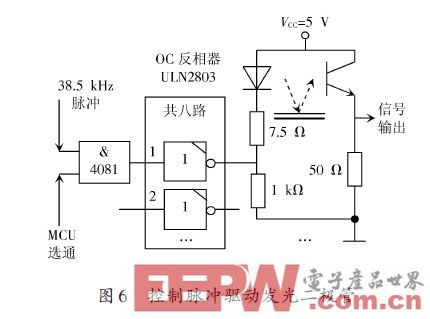
红外发射接收采用一体化封装的TCRT5000对管,电流传输系数>20%,发射管最大持续允许电流IF 为60 mA,脉冲电流在1 μs/1%占空比时允许3 A.脉冲信号经红外发光管发射后,经地面反射,送到光敏三极管从发射极输出。如果地面为白色,绝大部分信号(脉冲)都能传递给光敏三极管;如果地面为黑色,光线被吸收,则几乎没有信号能传递给光敏三极管。
控制每一路持续工作的时间应保证让红外发光二极管发出10~20个脉冲,使后续解调器能可靠解调。可以算出循环一周共8路所需时间:
T=([ 1 38.5 kHz)×(10~20)]×8=2.08~4.16 ms.
3.3 放大器电路设计
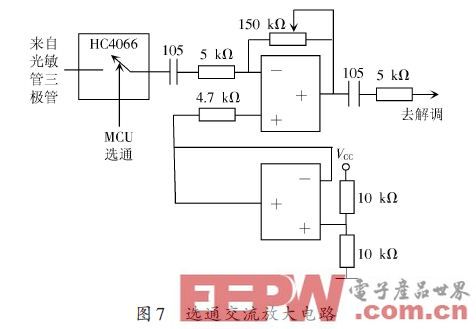
由于有8个光发送接收对管,图6中仅显示出1路,如果只想用一个放大器和后续的一个脉冲频率解调器,则需要模拟开关来一一选通。为了和图6共用选通信号,采用两片74HC4066(也可以用一片74HC4051,但这时就不能共用74HC4081选通信号了,既浪费了MCU的IO口,编程也较为复杂些)。
按2.5节所述要采用交流放大器的原则,这里采用零漂移双运算放大器AD8552,一个单元接成反向比例运算电路,另一个单元实现输出中点电位给放大电路作参考“地”.电路如图7所示。可通过反馈电阻调整其放大倍数。
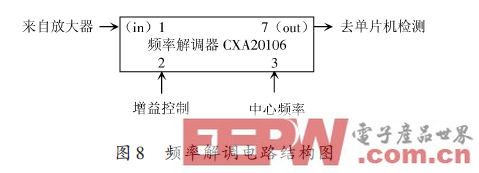
3.4 信号解调
信号解调采用标准38.5 kHz解调器CXA20106,装置中增益控制和中心频率控制用的电容器尽量采用精密低损耗无极性电容器,最好采用CBB 电容器。电路结构图如图8所示。
4 结语
按照本方案所介绍的红外光循迹设计原则所设计、装配的电路,可以满足绝大多数较复杂竞赛现场的需求。现场竞赛时抗干扰能力较传统电路相比大大加强了,既克服了环境光线的干扰,也克服了临近红外循迹发光管的衍射干扰。电路调整比传统电路更加简单:仅需调整放大器的放大倍数这一项,且一次性调好,避免了传统设计繁琐的调试工作量,可以满足各种环境光线的应用。由于任一时刻只需发出一路强红外光,并且还是低占空比的调制光,所以不但不会因为采用强红外光造成成车体电池供电不足,相反的,若干个循迹发射二极管轮回通电比传统的循迹电路一组多个一直通电的情况更省电。
- 基于MSP430的颅内出血检测设备设计方案(07-20)
- 基于SLH89F5162的智能清洁机器人(03-03)
- 总线报警主机红外光栅视频联动系统(12-14)
- ST1101红外光电传感器的电动自行车速度与里程表设计(11-28)
- 一种实用的红外光通信系统的设计(03-07)
- 基于ARM设计 的红外光汽车速度管理系统研究(01-07)