基于ARM设计 的红外光汽车速度管理系统研究
引 言
车辆在公路上应以与路况相符的速度行驶,太快了易出事故, 太慢了将成为后续车辆的绊脚石。但是,常有个别司机不按规定的速度行驶而违章,导致事故频生。交管部门为了取证纠违, 目前多采用雷达测速系统(利用多普勒效应)对违章车辆进行测速取证,予以处罚。
可近期市场上出现了一种叫做“电子狗”的反雷达测速装置,此装置在接近雷达测速区时,能提前捕捉到雷达测速的信息而报警,使违章车辆逃脱处罚,事故隐患犹存。因此,研究一套既能准确测定汽车速度, 又不会被“电子狗”所发现的可靠测速、管理系统就尤为必要。
本文研究的以红外光传感器、ARM 为核心部件的新型测速系统测速时不会被“电子狗”所发现,不仅能识别汽车速度V 的大小,还能测出其速度超过上限速度(Vmax)的量值(+△V)或低于下限速度(Vmin)的量值(—△V)等信息,据该信息酌情驱动取证系统(打印、照相)工作,能有效提高交通管制的力度。
1 系统工作原理
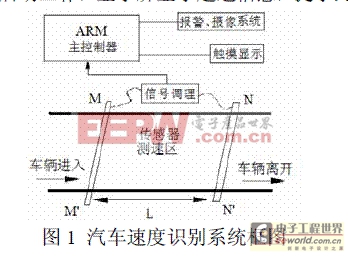
系统由调制式红外光传感器[1]、飞利浦公司的LPC2294 ARM 嵌入式处理器,带触摸屏的彩色液晶显示器以及报警摄像等系统构成,如图1 所示。图1 中M、N 两点是路旁一侧护栏上的两点,分别安装着可发射38KHz 的红外发光管,一直向外发射调制式红外光。调制式红外光被另一侧护栏上相应的两点M’、N’处安放的光电接收器接收,共同组成一个光控测速区。当有车辆通过光控测速区时,M 点发出的光线首先被阻断,第一个光电探测器M-M’将光信号转换为电信号送入信号调理电路,经过放大、整形,送至ARM 处理器。ARM接到此触发信号,打开内部计数器开始计数,时间t 的值相应不断增加。当汽车达到N 点时,第二个光电探测器N-N’将光信号转换为电信号经信号调理电路送至ARM 处理器使计数器停止计数,t 的值就确定了。由M、N 两点间的距离L 除以t 便得到速度V。如果计算得到的V 值在设定的安全速度范围之内,显示屏则显示当前安全速度值,摄像、报警电路就不工作;如果V 值超出设定范围之外,则计算速度偏移量△V =Vmax—V,同时显示该车辆超速行驶,并让摄像、报警电路启动工作。同理,若车辆以VVmin 的低速状态通过光控测速区时,照相及报警系统亦启动工作,显示屏显示超速信息,提示此时车辆处于超低速行驶状态。
2 系统硬件设计
2.1 光电发射接收系统
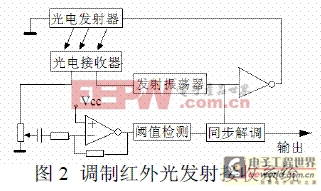
光电发射接收系统原理如图2 所示。振荡器产生频率为38KHz 的信号, 驱动红外发光管发光。光电接收器则接收红外发光管射出的光脉冲,接收到的光脉冲信号经调节电位器连接到检测器的输入端[2]。将接收到的调制式光脉冲信号送入放大器进行放大,经阈值检测后变成与同步振荡器同步输出的逻辑电平脉冲,再通过脉冲同步解调,得到与车辆运动状态相关的光电信号,并经缓冲输出。
2.2 信号接收与定时器工作
如图3 所示,在没有车辆经过光控测速区时,M’、N’两点一直能接收到38KHz 的调制红外光,均输出高电平,暂稳电路均处在稳态。门G 的输出为逻辑1,UL 始终为高电平。当有车辆通过光控测速区时,M 点发出的光线首先被阻断,UM 由高电平先变为低电平,暂稳态电路1 被触发而进入暂稳态,如图4 中的t1 时刻之后所示。此时,UM’为低电平,G 门触发,输出UL 为低电平。ARM 系统的CAP1.0 捕获到UL 由高电平变低电平,发生下降沿捕获,自动装载T1TC 的值传输到捕获寄存器T1CR,并产生中断,进入中断服务子程序,读取T1CR 的值而保存。

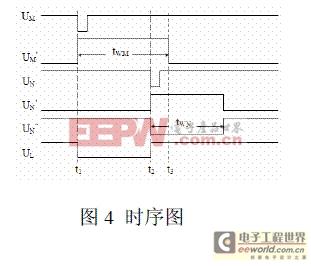
随后,当汽车达到N 点时——即在t2 时刻,暂稳态电路2
被触发,UN’变为高电平,经过非门变为低电平UN’’。此时G
门输出由低电平变为高电平,ARM 的CAP1.0 捕获到UL由低电平
变高电平,发生上升沿捕获,自动装载T1TC 的值到捕获寄存器
T1CR,并产生中断,进入中断服务子程序。计算两次捕获寄存
器T1CR 的差值N 及计数器的工作频率f,得到车辆通过两测试
点M 点和N 点的时间差t2-t1。
2.3 ARM 核心板及触摸显示系统
系统核心板采用DEVICEARM2200 工控板, 其内嵌飞利浦公司的LPC2294ARM7TDMI-S 嵌入式处理器,最高频率60MHz,并带有8M PSRAM 存储器和16M NANDFlash,性能完全满足高速车速测量系统的要求。由于其较小的封装、极低的功耗,可使用电池供电,因此十分适合于野外无外接电源的情况下工作。
电路连接如图 5 所示:显示屏选用320×240 彩色液晶屏,将液晶控制器S1D13503 的AB0 至AB16 与LPC2294 的地址总线A1 至A17 相连,以16 位总线方式操作;S1D13503的数据总线DB0 至DB7 接LPC2294 的外部存储器数据线D0 至D7, DB8 至DB15 接VDD,实现与LPC
- 基于MSP430的颅内出血检测设备设计方案(07-20)
- 基于SLH89F5162的智能清洁机器人(03-03)
- 总线报警主机红外光栅视频联动系统(12-14)
- ST1101红外光电传感器的电动自行车速度与里程表设计(11-28)
- 一种小车红外光循迹电路的设计(04-09)
- 一种实用的红外光通信系统的设计(03-07)