基于STC89C52的太阳追踪系统设计
电机的配合转动实现执行模块在水平跟俯仰方向上的运动,从而实现全程追踪太阳。
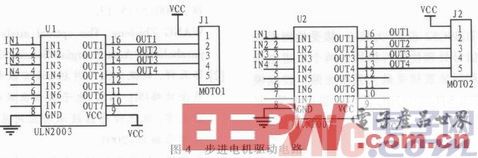
两步进电机由两个ULN2003芯片驱动,两驱动芯片与控制模块中单片机的P0口相连接。其中,P0.0—P0.3控制水平方向上的步进电机,P0.4-P0.8控制俯仰方向上的步进电机,在单片机的控制信号下实现转动或停止。两步进电机的驱动电路如图4所示。
2.2 检测模块设计
水平光电传感器及其相配合的水平遮光器结构实物如图5所示。用水平光电传感器检测水平遮光器产生的阴影来确定太阳能利用装置与太阳的水平相对位置。
俯仰光电传感器及其相配合的俯仰遮光器结构实物如图6所示。用俯仰光电传感器检测俯仰遮光器产生的阴影来确定太阳能利用装置与太阳的俯仰相对位置。
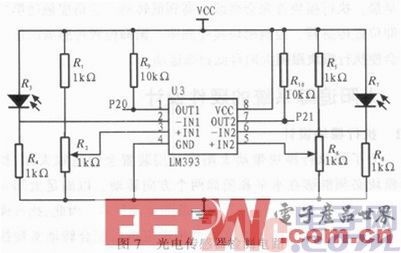
遮光器配合下光电传感器检测电路主要由光电传感器、电阻、电位器以及LM393芯片组成。当光电传感器接受的光照强度大于设定值时,LM393芯片-IN管脚电位低于+IN管脚电位,此时,LM393芯片OUT管脚输出高电平;当光电传感器接受的光照强度小于设定值时,LM393芯片-IN管脚电位高于+IN管脚电位,此时,LM393芯片OUT管脚输出低电平。LM393芯片-INT管脚和+IN管脚分别与单片机的P2.0和P2.1口相连。两光电传感器的检测电路如图7所示。
根据太阳的运动轨迹,执行模块在水平方向上的转动角度为180度,执行模块水平方向上装有两个位置传感器,用来限定执行模块的水平运动范围;执行模块在俯仰方向上的转动角度为90度,执行模块俯仰方向上也装有两个限位传感器,用来限定执行模块的的俯仰运动范围。
2.3 控制模块设计
控制模块以一片STC89C52芯片为核心,接受检测模块传递的信号后,通过对信号处理使执行模块的两个步进电机动作,从而保证太阳能利用装置接受最大强度光照。控制模块中应用的单片机系统由STC89C52RC芯片、供电电路、复位电路、晶振电路四部分组成。
3 系统软件的设计
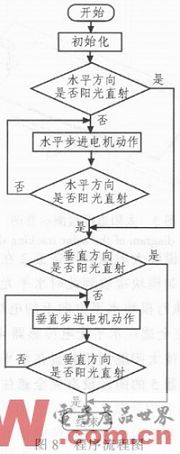
该控制系统的软件主要由一个主程序及一些子程序组成。主程序由一些状态选择语句、循环语句组成,主要是在系统复位后重新检测执行模块与太阳的相对位置。当传感器传回相应的光照、位置等信息后,STC89C52响应相应信号,控制步进电机转动。子程序的主要作用是通过电机正反转控制执行模块的动作,使太阳能利用装置在水平与俯仰方向上组合运动。
程序流程图如图8所示。
4 结束语
太阳追踪系统创新之处在于仿照向日葵,遵循太阳运动规律,采用采用光电传感器检测太阳照射下遮光器的阴影精确定位太阳与太阳能利用装置相对位置,通过单片机智能控制,实现太阳能利用装置的全程太阳追踪。本系统的主要功能是提高太阳光能的利用率,以缓解当前能源紧张的现状。将其应用在太阳能发电站、太阳能路灯、太阳能热水器、太阳灶以及所有固定式太阳能电池板等处,能够大大提高这些装置的利用率。随着人们节能环保意识的不断提高,它将被应用到更广泛的场合。
- 基于STC89C52的智能印章机的设计方案(01-13)
- 从易到难学习单片机(单片机DIY制作、毕业设计、课程实例)(06-04)
- 初始的STC89C52RC单片机小实验(12-03)
- STC89C52单片机定时器2的使用(12-02)
- STC89C52-秒表(精确10ms)同时LED二进制计数(12-01)
- STC89C52单片机驱动CC1101无线模块的接收C语言程序(11-30)