基于欧姆龙PLC的油库无人监控系统设计
1 引言
大型火力发电厂油库系统在机组启停及机组低负荷时用于向锅炉提供燃油。传统运行方式由值长下达用油命令,油库值班人员启动设备进行运行管理,需要人员长期在油库值班,浪费大量人力,本文将介绍厦门某4*300mw电厂采用组态王软件及plc进行油库控制系统改造,实现油库设备无人职守。
2 工艺流程分析
燃油系统共有两个油罐通过阀门切换可以选择#1油罐、#2油罐进行用油,在供油母管安装有一个气动阀门,通过控制阀门开度,可以控制供油母管回油数量,从而调节供油母管的压力,以确保锅炉用油在正常压力范围内。
2.1 主机监控要求
主机在锅炉需要用油时启动一台油泵电机向锅炉供油,同时打开油泵循环冷却水阀门。当供油管压力小于3mpa时,调小供油母管气动阀,当气动阀调到最小时还无法达到母管所需压力要求时,系统启动另一台油泵电机及其油泵循环冷却水阀门。
2.2 辅机控制要求
辅机包括控制一台污油回收泵电机及净化油回收泵电动机,当油库污油池达到高油位时启动污油回收泵,进行污油回收,到低油位时停止电机运行;油库净化油池达到高油位时启动净化油回收泵,进行污油回收,到低油位时停止电机。
2.3 上位机监控要求
模拟量信号主要包括两个油罐温度测点共22个、供油母管压力、供油母管回油气动阀开度、两台油泵电机电流信号、油罐油位;数字量信号——两台油泵电机状态(包括运行、停机、跳闸)、污油回收泵电机及净化油回收泵电动机状态(包括运行、停机、跳闸)、两台油泵出口压力状态(包括低压力、高压力)、污油池高低油位、净油池高低油位、plc通信状态等。
2.4 硬件架构体系
plc主机采用日本欧姆龙c200he-cpu42单元。执行系统逻辑控制,运算及通过软件编程实现模拟量输入信号的采样、滤波、pid控制等功能,上位机通过rs-232c/rs422通信接口转换实现与plc通信。硬件系统有2个数字量输入模块、2个数字量输出模块实现现场各开关状态采集及执行元件驱动,6个温度采集模块用于两个油罐本体温度的采集,ad002模块用于气动阀控制,da002用于油泵电动机电流、母管油压、油罐油位、供油回油阀开度信号采集。
3 plc程序流程设计
3.1 油泵电机控制
当接到启动油泵指令时,操作人员在上位机上进行启动操作,可选择启动a油泵电机或b油泵电机并启动相应的油泵冷却水系统,对油泵进行水冷却,避免油泵温度过高。启动一台油泵无法达到母管压力工作要求(大于3mpa)时,首先对回油气动阀进行调节,调到气动阀最小形程时,仍无法达到3mpa以上,启动另一台油泵,并进行判断油压是否大于3mpa,如果还小于3mpa,系统进行报警处理,通知运行人员进行现场检查。当母管油压大于工作压力最大值6mpa时,调整气动阀进行压力调节,如果气动阀已调整到最大值仍无法满足工作压力要求,进行报警,通知运行人员处理。程序流程如图1所示。
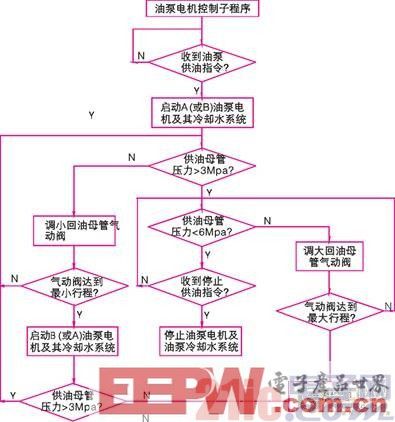
图1 油泵电机控制流程
3.2 油库辅助系统
油库辅助系统主要根据油池的油位控制两台电机的启停,以及时回收废油,避免环境污染。其工作流程分别如图2、图3所示。

图2 油位控制流程
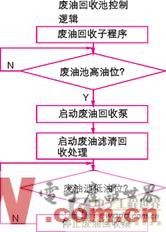
图3 回收废油流程
3.3 模拟量数据采集处理
为了避免现场干扰,模拟量采集在plc中采用平均值滤波方法进行抗干扰处理。连续采集五次数,并剔除其中最高及最低两个数,然后在对其余的三个数作平均,并以其值作为采集数。
3.4 气动阀控制
由plc模拟量模块输出控制信号4~20ma,阀门控制器把电流信号转换为步进电机的行程信号,电机转动,由杠杆带动阀杆运作,实现直行程。电机运行,通过齿轮运转,由三接头的滑动变阻器输出阀门的定位信号,此外还有全开,全关数字量限位信号。控制系统根据上位机的给定值及反馈开度信号,通过pid运算进行控制。
4 监控软件设计
上位机监控软件采用组态王5.1版本,该系统运行于windows 系统,系统功能完善、稳定,其内嵌的可编程控制器通信协议有广泛的硬件支持,并采用dll通信方式,采样速度快,可靠性高,使用方便。上位机组态王主要功能设计:
4.1 油库设备动态显示
通过与plc进行通信,采集油库各设备状态,并通过程序组态,可以直观显示现场设备运行状态、电机电流、调节阀开度、温度等数值,操作人员在控制室就能获得设备状况并及时做出反应,如图4所示。
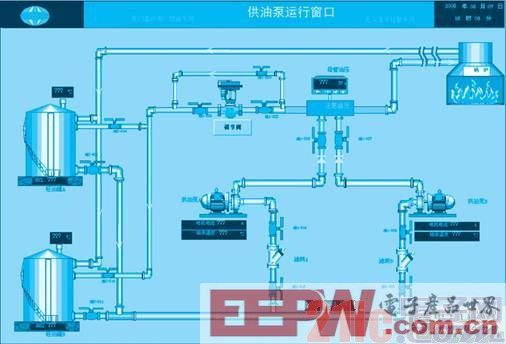
图4 油库设备动态显示画面
4.2 远程控制
在供油泵运行主窗口上用鼠标点击设备控制窗口,系统弹出该设备操作画面,就可以对设备进行相应操作,包括两台油泵根据母管油压状态进行连锁/解锁运行、油泵启动/停运、污油泵、回收泵启动/停运,气动阀开度设置等。
4.3
- 欧姆龙PLC基本逻辑指令(12-16)
- 欧姆龙PLC基本逻辑指令应用举例(12-16)
- 欧姆龙PLC功能指令(12-16)
- 欧姆龙PLC常用基本应用程序举例(12-16)
- 欧姆龙plc网络与通讯(12-16)
- 威纶触摸屏与欧姆龙CJ、CS、CP系列PLC通讯示例(12-16)