基于PSoC?4的矢量控制方案 :电流采样
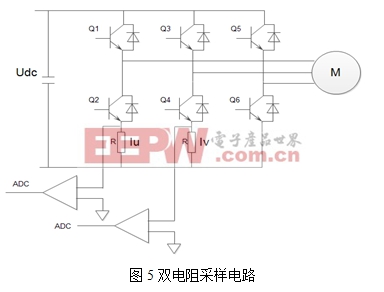
采样。或当U或V相电压占空比较高时,续流时刻较短,功率管开关会造成电流振荡,此时采样会造成较大误差。因此采用双电阻采样方式时,一般限制电压最大相占空比为95%左右,给电流采样留出足够的空间。
双电阻采样方式只需要2个采样电阻,两个运放即可完成三相电流重构。但电压利用率较三电阻低,达不到100%,不支持两相调制(另一相调制比为100%)。
3) 单电阻采样
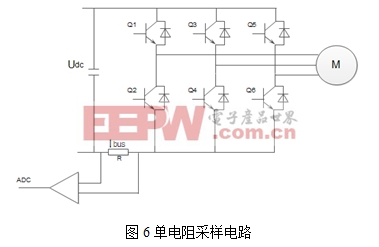
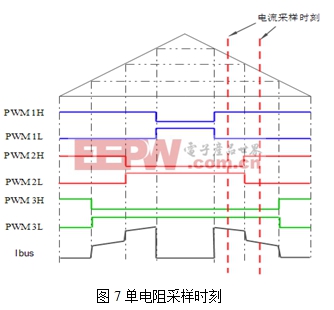
单电阻典型采样电路如图6所示, 到 是6个功率晶体管。在母线上串联一个采样电阻,采样电阻上的电压信号再经过运放送达ADC。单片机通过ADC在一个PWM周期内采样两次采样出两相电流,然后通过公式“Iu + Iv + Iw = 0”重构出第三相相电流。典型的采样时刻如图7所示。以图7所示的采样时刻为例,第一次采样的母线电流为-Iu, 第二次采样的母线电流为Iw。由此便可重构出三相电流。
单电阻采样突出的一个问题是采样盲区的问题。在两相占空比非常接近时,留出的采样窗口会非常窄,此时采样误差较大甚至无法进行采样。一般通过PWM平移或建立电流观测器对电流进行估算的方法进行解决。
单电阻采样仅需一个采样电阻,一个运放即可完成三相电流重构,成本优势突出。同时由于仅需在母线电流上串接采样电阻,可用于下桥臂不开放的智能功率模块(IPM)的应用场合。但单电阻采样实现较为复杂,同时存在采样盲区的问题。
4. 基于PSoC4®的双电阻采样设计实例
三种采样方式各有其优缺点,使用时应根据具体应用场合综合考虑。以上三种采样方式均可采用PSoC4®灵活实现。下面将以双电阻采样为例,介绍如何使用PSoC4进行设计。
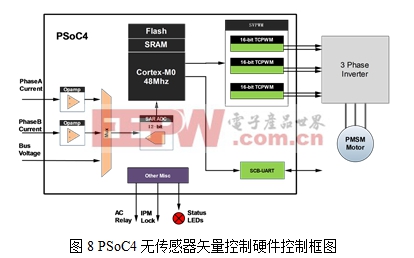
PSoC4®内部集成四个独立的可支持中央对齐、互补的可编程死区及同步ADC操作的TCPWM模块;一个支持零开销通道切换功能的12位1 Msps ADC; 两个支持比较器模式及SAR ADC输入缓冲功能的运算放大器。丰富的片内资源可将主控电路所需芯片集成到一片芯片中,实现高度集成化。图8显示了PSoC4矢量控制(无传感器)典型硬件控制框图。
相对于其他解决方案,基于PSoC4的矢量控制解决方案具有以下特点优势:
1) 采用高性价比的Cortex-M0内核。Cortex-M0是市场上现有的最小、最节能的ARM处理器,代码占用空间小,能以8位处理器的价格获得32位处理器的性能,可明显节约系统成本。
2) 内部集成两个支持比较器模式及SAR ADC输入缓冲功能的运算放大器。目前市场大部分解决方案均需外部运放完成电流采样,采用PSoC4可从系统BOM表中移除外部运放,减少系统成本。
3) 内部集成两个低功耗比较器,可用于硬件保护或错误信号处理。市场常用解决方案大部分采用外部比较器完成此功能。采用PSoC4可进一步减少BOM,降低成本。
4) 减少PCB空间及BOM成本。由于PSoC4集成了电机控制所需大部分外设及其他丰富的模块,可实现高度集成化的设计。
5) 固件IP保护。PSoC提供了极强的软件/硬件IP保护能力,这对电机应用尤其重要。
6) 宽电压范围,支持1.71-5.5V。
原理图设计
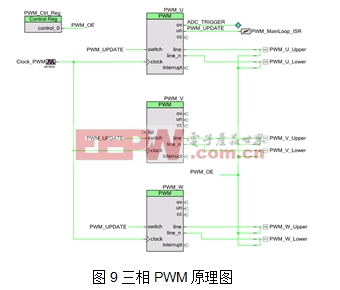
首先,我们使用TCPWM模块来实现SVPWM。如图9所示,从PSoC Creator中拖放三个TCPWM模块,配置TCPWM的工作模式为中央对齐,带死区的双路互补输出模式。三对PWM输出可分别作为U、V和W相桥臂驱动信号。同时在任一TCPWM模块的UN事件输出(下溢信号,用来指示计数器向下计数达到“0”)触发PWM中断,用于进行FOC计算并更新占空比。
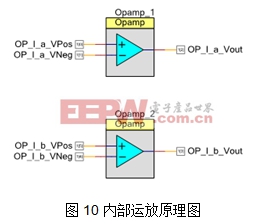
我们采用芯片内部运算放大器进行信号放大。PSoC4内部的运放是一个高度可配置的运算放大器,可配置其速度,功耗,驱动能力和补偿。也可配置成比较器进行使用。运放增益带宽可达4MHz(容性负载为20pF时),可实现轨到轨的输入输出动态范围。图10显示了内部运放的原理图,电路形式采用差分放大形式,相关阻容在芯片外部。
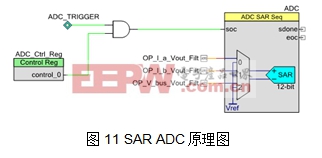
PSoC® 4包含了一个12位的逐次逼近型模数转换器(SAR ADC)模块,其可满足中等分辨率、快速转换的应用需求。能够实现最高1Msps的单通道采样,支持零开销通道切换功能。SAR ADC具有8个可配置通道和1个插入通道,可灵活的通过软件、定时器、管脚或来自UDB的信号触发,支持单次、周期或连续模式采样。图11展示了SAR ADC原理图,可采集UV两相电流及母线电压。
程序设计
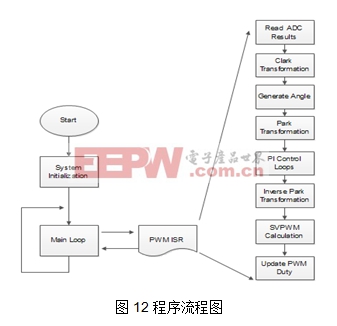
主控程序首先会初始化和配置PSoC®4的内部资源,然后进入主循环。主循环主要检测用户的起停命令和速度给定,决定电机的运动状态;并完成一定的调试输出功能。FOC主算法全部在PWM中断中完成,主要完成读取ADC采样结果,完成坐标变换,PID控制,SVPWM输出及更新占空比等操作。具体流程图如图12所示。
实验结果
在PSoC Creator环
Cypress PSoC CY8C4200 PMSM CPU 相关文章:
- 基于PSoC?4 的PMSM无传感器矢量控制(09-23)
- 基于CY8C3866的无线脑电信号采集检测系统设计(06-24)
- 解读USB控制器芯片及其在图像采集中的应用(06-06)
- 基于CYUSB3014高速实时数据采集系统的设(04-23)
- 一款基于CYPRESS的USB3.0总线设计(03-19)
- 一种基于PSoC的汽车中控台面板设计(03-10)