一种基于单片机的智能LED驱动电路系统设计
摘要 采用单片机智能控制以实现由风、光、市电多路输入的大功率LED驱动电路设计。其中,风光发电互补系统实现了不同工作情况下的最大功率点跟踪控制策略,并以模拟的风光能源展示发电特性,完善了风光互补措施。蓄电池充电控制方案分段优化充电过程,以智能化操控实现能源的最大利用。从而实现了驱动电路整体最优性能的设计。
关键词 驱动电路;风光互补;LED;MPPT
智能LED驱动电路系统是基于风能和太阳能发电系统而改进设计的。其中,风电和光伏发电赋予了较高的优先级,在两种能源不足以供给照明时,再采用市电提供电源。由于受天气、时间、地域条件的改变,太阳能和风力资源有着不同的分布,为达到最大的风能光能利用率,采用了风光互补系统,并进行MPPT控制策略改进能源输入方案。单片机控制系统可对多路电源输入进行控制,按一定的优化方案执行对驱动电路供电。因为未采用单一能源的电力供应,为使风力发电和太阳能发电达到最大功率,MPPT控制策略扮演了重要角色。文中将综合太阳能电池板和风力发电机组的特点,分析它们的输出功率特性,以优化的风光电源对蓄电池的充电过程。在单片机智能控制系统的控制下,建立一个合理的解决方案,提供一个恒流电源以满足项目设计要求。
1 多路输入驱动LED基本方案
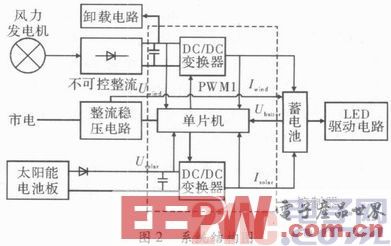
LED智能驱动电路系统的结构图如图1和图2所示。系统由负载、控制器、驱动电路、风力发动机、太阳能电池板、蓄电池和市电组成。
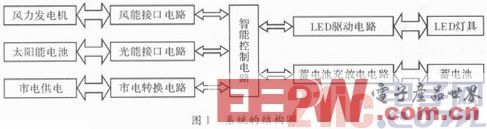
多路输入就是以市电、太阳能电池板和蓄电池作为电源动力,在实际工况中经常遇到,因为市电下很多路灯的工作情况不太稳定或者断电,这样需要照明时经常停电影响交通,这时可以通过太阳能或蓄电池进行供电,即在驱动电路里面加入选择判断电路组成多输入控制选择器。同时利用MPPT控制方式,实现最大限度的能源利用。通过对风机发电和光伏发电的控制调节,若发电电能未能供给所有电气负载时,风光互补控制器将传送给负载蓄电池电能。反之,控制器控制电路直接供给负载电能,并将剩余电能充电至蓄电池内。同时控制器保护蓄电池,使其工作在合理的电压区域内,确保蓄电池安全稳定的工作。
2 MPPT控制方案
2.1 风力发电特性原理
由流体力学中气流动能公式可以得出采用气流所具风能的大小同通过的面积、气流密度以及气流的速度成正比关系

由于风力发电机在发电风能利用率的局限性,无法做到自然风能的全部利用,所以在计算风机实际有用功率输出时需要考虑留在尾流中未利用的动能,基本公式为

上式,一般情况下Cp<0.593,其表示风力发电机的实际风能利用系数,可由贝兹(Betz)极限理论得到。风能的利用系数Cp与风力机的叶尖速比有关,叶尖速比一般用λ来表示,由风力机叶尖旋转的圆周速度和风速的比值来确定

图3给出了风能的利用系数和叶尖速比的曲线关系,是风力机的基本特性之一。
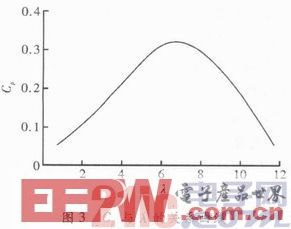
在λ处于某一特定值λ0时,就定浆矩风机而言,Cp达到最大并且风力机具有最大机械功率的输出,最佳叶尖速比用λm表示。因自然风具有不定随时变化的特性,这会使得Cp在大多数情况下不在最大工作点上,此时,风机的效率经常处在较低水平。对于这个问题,处理时需要控制风力发电机的运行速度,在一个较大的风速范围内,尽可能使风能的利用系数在最大值附近运行,且叶尖速比λ达到最为优化的叶尖速比,以实现风电转换最高效率的跟踪。
2.2 太阳能电池板特性
太阳能电池的功率特性非线性化较为明显,容易被外界因素影响。不同日照下表现出的电压/电流和电压/功率特性,如图4和图5所示。

2.3 变步长扰动最大功率点搜索控制
通过分析风力发电机的输出特性,可采用3种方式确定其最大功率点:扰动搜索其最大功率点、控制功率信号、控制叶尖速比。因为要借用风速计,使得叶尖速比控制成本较高,它主要应用于大型风机控制。为控制功率信号,需要得到风力发电机的最大功率负载曲线。采用最大功率点扰动搜索控制较为简便。而太阳能MPPT的控制有恒定电压控制法、最大功率点的观察扰动法、导纳增量法。
综合考虑太阳能和风力发电机MPPT控制功能,本项目使用改变步长搜索扰动方法控制最大功率点,MPPT控制的关键是如何使最大充电功率电池电压平稳,同时电池充电和发电部分功率相等。检测电池的充电电流以及电压,能够计算得到此时的电能利用率。
当系统运行时,控制信号起始基准功率为Pa,其占空比为x,输入一个扰动△x,Pb为检测扰动后的功率。当Pb>Pa时,证明扰动方向无误,保持同方向施加扰动已搜寻最大功率点;反之,
- L298N电机驱动电路设计(11-27)
- 舞蹈机器人步进电机驱动电路和程序设计(10-15)
- 基于ARM的直流电机数字式电子调速器设计(09-12)
- 一种宽范围可调的小型DC-DC降压变换器(12-28)
- 一种LCD控制驱动电路测试方法介绍(08-28)
- 一种无刷直流电动机控制系统设计(01-02)