一种基于FPGA+DSP的通用飞控计算机平台设计
时间:07-08
来源:互联网
点击:
运动信息由惯导测量之后发送给飞控计算机,飞控计算机根据运动信息解算出舵机控制量控制舵机转动,同时将遥测数据发送给上位机。上位机采集舵机反馈的实际角度,将其代入导弹动力学模型,计算导弹姿态,控制三轴转台,这样就形成了完整的半实物仿真回路。
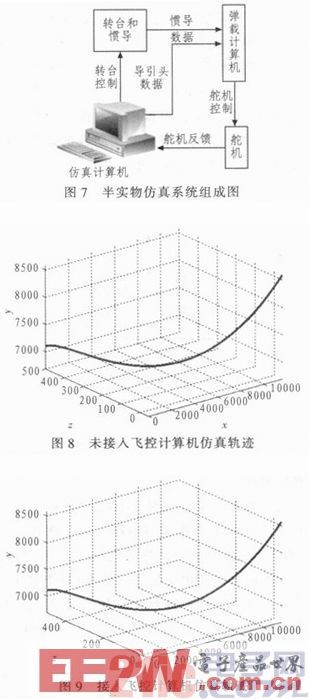
仿真实验中,首先不接入飞控计算机,由仿真计算机中的控制系统数学模型直接实现控制算法,所得导弹运动轨迹如图8所示;将飞控计算机接入仿真回路,由飞控计算机实现制导控制算法所得运动轨迹如图9所示。
由图8和图9的对比可以看出,飞控计算机接入之后飞控系统工作正常,导弹飞行轨迹基本一致,飞控计算机控制效果理想。
5 结论
文中提出了一种基于DSP+FPGA的飞控计算机设计方法,在半实物仿真系统中验证了其性能,满足设计要求。解决了在多数字弹上设备存在情况下的数据帧实时同步问题。由于FPGA可以通过编程实现各种时序,所以此飞控计算机可以扩展为除了RS422外部接口外的其他多种数字设备接口,满足模块化、通用化的实际应用需求。
- 基于DSP+FPGA的数字导弹飞控计算机设计(10-22)
- 基于FPGA的Bayer彩色自动白平衡设计与实现(06-05)
- 数据采集装置在某型控制器中的应用(01-21)
- 双端口RAM在单片机系统中的应用(03-08)