一种基于Robocup F-180小型组足球机器人的无线通信系统
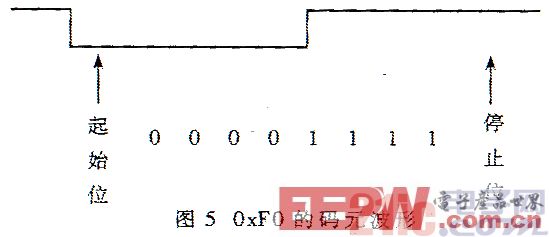
发生错误。由于 0xF0的这种特性就可以用它做同步码元,在空闲的时间内通信系统就通过一直发送同步码元,使接收端保持同步,而且也可以保持接收模块的0直流电平状态。
2.2 纠错编码设计
为了在有一定外界干扰的情况下,保证主要与机器人之间的无线通信依然稳定可靠,必须采取一定的抗干扰措施,这可以采用纠错编码来实现。可以选择纠错编码方案有(14,8)分组码、(7,4)分组码和循环码,需要使用两字节的长度发送一字节的有效信息;(5,2)分组码和循环码,交错码、(21,8)分组码和缩短循环码、(21,9)BCH码、(21,12)BCH码,需要使用三字节的长度发送一字节的有效信息。 系统中使用了(7,4)分组码,并在实际中取得了较好的效果。它的构成方式如下: 假定不做任何处理的原码格式为:

其高四位的监督码为: A2 A1 A0 其低四位的监督码为: B2 B1 B0 则编码后成为两个byte长度: 1 X7 X6 X5 X4 A2 A1 A0 0 X3 X2 X1 X0 B2 B1 B0 其中每个字节的最高位作为标志位,用于表示高四位和低四位,高四位用“1”做标志,低四位用“0”做标志。接收端通过检测标志进行重组和解码。对于译码基本方法有维特比译码和使用监督矩阵译码,可根据具体的编码方案灵活选用。
2.3 帧格式设计
一般数据帧包括帧头、机器人标识、数据、数据校验、保留字节等内容,通常按照下面的格式排列: 帧头机器人标识数据保留字数据校验为了保证帧能够准确接收,帧头的设计至关重要。一般帧头需要两个或两个以上的字节,并且应该选择数据中出现几率较低的数值和组合。在这个系统中可以采用一般数据中根本不会出现的数据字节如0xF0、0xCC作为数据帧头。而其它类型的帧(如开球或暂停等命令帧),则可以选择在0xF0之后加上其它的字 0x33、0xC3、0x3C、0x0F等构成。这种帧头组合在一般的数据中是不会出现的,因而可保证帧同步不会出错。场上的每个机器人通过数据帧中的机器人标识来识别属于自己的数据,由于场上只有5个机器人,因而机器人标识只占用一个字节。 这套通信系统采用了PTR3000无线通信模块进行无线传输,并运用了单处机的编解码使这套系统工作更加稳定可靠,使数据通信及时正确地传送到场上的每个机器人,完全满足小型组足球机器人比赛的通信速率和正确率要求。
这套小型组机器人通信系统已应用于中国科技大学的F-180 Robocup小型足球 机器人系统中。2003年7月在意大利举行的Robocup小型机器人足球比赛中,这套通信系统在存在各种通信干扰的情况下依然表现出了较高的可靠性。 2003年8月在北京举办的全国机器人大赛F-180 Robocup小型组的比赛中,这套通信系统中中国科技大学一队赢得了亚军。
- DSP 与PC 机串行通讯的设计(01-13)
- TMS320LF2407 DSP控制器的串行通信设计(01-26)
- TMS320C3x DSP和PC机的异步串行通信设计(03-02)
- DSP串行通信在减摇水舱试验台架控制系统中的应用(10-10)
- 高速DSP与串行A/D转换器TLC2558接口的设计(09-08)
- 基于FPGA的串行通信控制系统的设计(06-05)