一种基于加速度传感器的机动车制动性能监测系统
踏板力传感器的量程选择为0~1 000 N。踏板力传感器选用的是北京龙鼎科技的LDCZL~TL,该踏板力传感器是电阻应变片式传感器,可以进行压向力测试,输出对称性好。具有测量精度高、结构紧凑、稳定性能好、温度漂移小等特点。其体积呈扁平状态,可灵活方便地装于汽车踏板上,采用孔幅结构,具有先天的抗踩踏的偏置力且体积孝抗振能力强、输出电压信号。工作电压在±10 V DC,灵敏度1.5 mV/V,可以满足系统的测试精度要求。
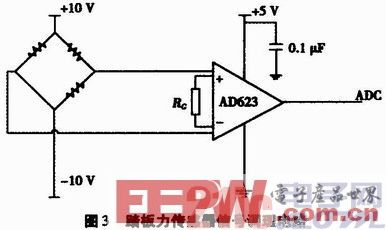
由于踏板力传感器安装在汽车踏板上,靠近发动机、启动电机等强干扰源。并且由于驾驶员和各测试项目的要求不同,电桥的输出信号变化范围大,要求信号检测电路具有低噪声、低零漂、高抗噪、增益大范围可调等性能,根据以上要求选择仪表放大器AD623作为踏板力信号放大器。AD623是集成的单电源仪表放大器,其通过提供极好的随增益增大而增大的交流共模抑制比(AC CMRR)而保持最小的误差,线路噪声及谐波将由于共模抑制比在高达200 Hz时仍保持恒定而受到抑制。
它能够在单电源(+3 V~+12 V)下提供轨对轨输出,允许通过增益调节电阻进行增益编程,从而具有良好的灵活性,其增益最高可达1000倍,增益调节电阻大小由下式求得:
RG=100 kΩ/(G-1)
踏板力传感器信号调理电路如图3所示。
1.4 微控制器选型
为了设备能够在多种情景下工作,采用两路供电,通过开关选择,一路由锂电池供电,一路由汽车内部12 V DC直接供电。同时为了满足持续监控的使用要求,选择支持超低功耗的MSP430系列单片机,其拥有4种省电模式,其中LPM4的最低工作电流只有0.1μA,可以通过内部指令在不同工作模式下快速切换,因而MSP430系列单片机在电池供电的情况下拥有极大的优势。
MSP430系列是16位混合信号处理器,其拥有丰富的片上外围模块,片内有硬件乘法器、两个具有PWM功能的16位定时器、一个14路的12位的模数转换器。MSP430可以提供内置参考电压源(2.5 V)、一个看门狗定时器、两路USART通信端口、一个比较器并且支持8 M的时钟。同时
MSP430拥有丰富的具有中断功能的I/O端口,并拥有大容量的Flash和RAM。
综上所述,MSP430拥有的丰富资源可以简化系统的电路设计,缩短开发时间,降低系统成本,其低功耗特性更是能够提高系统的便携性,因而使用其作为制动性能监测系统的处理器。
2 软件及算法设计
系统以三轴加速度传感器为核心,系统开机后从存储器上读取上次检测后上位机发回的指令及数据存储的末地址,在踏板力传感器被踩下后,进入加速度数据与踏板力数据采集阶段,并同时通过MSP430内部定时器对制动过程计时,采集数据的同时,记录该数据的采集时间点。在制动过程完成后,通过相应的数据处理程序计算制动过程中的踏板力、平均制动减速度等参数并将测试数据发回到上位机进行数据分析、图形化显示及记录等操作。下位机等待上位机的控制指令,收到指令后将之存储于存储器中,完成后返回预读系统初值状态,至此完成一次闭环检测与上报。
2.1 系统主程序设计
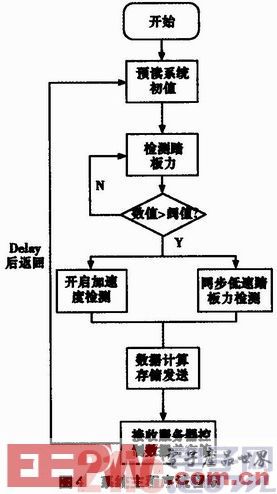
软件设计采取模块化的思想,系统由数据采集模块,系统控制模块,数据传输模块组成,系统流程图如图4。
2.2 数据处理算法设计
系统自踏板力传感器检测到压力且超过阀值时开始采集加速度信号。由于踏板力在制动开始阶段未达到最大值,故而在制动开始后,利用定时器开关中断以10 Hz的频率采集踏板力数据。同时从加速度传感器读取加速度数据。数据采集在连续采集到10组低于0.1g的加速度数据后停止,进入数据处理流程,计算制动初速度,平均制动减速度,制动距离等参数。
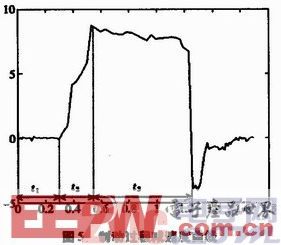
机动车制动过程可以分成三个部分,如图5所示,分别为t1:机械反应时间;t2:制动力增长时间;t3:制动力持续时间。机械反应时间t1以踏板力采集到踩踏的时间开始持续到制动力开始上升为止。制动力增长时间t2是指制动减速度由0上升到稳定制动阶段所需要的时间。t2结束点作为制动力持续时间t3的开始点,由图5可知在制动完成时,由于机动车前后轻微抖动,会产生负的加速度,将这个点作为制动完成点。
在机动车制动过程中,从制动踏板被踩下到制动生效有较长的制动准备时间,这给整个制动过程中的制动初速度,制动距离等变量带来了较大的累积误差。因而制动关键参数采取分段计算求得,从制动结束点向后数值积分。t1阶段可以视为匀速运动故而S1=vD·t1,t2阶段由于是变减速运动,故
但是根据实际检测证明,在t2阶段机动车也可以视为匀速运动。因而可以简化运算S2=v0·t2,制动力持续阶段也属于变减速运动,同时在向后积分的情况下,存在
- μC/OS-Ⅱ在MSP430F149上的移植(03-01)
- MSP430与I2C总线接口技术的研究(06-14)
- 基于MSP430单片机的超声波倒车雷达监测报警系统设计(08-14)
- 2010年中国(成都)电子展胜利闭幕(08-15)
- 基于MSP430单片机的电子汽车限速器的研究(08-20)
- 基于MSP430的微功耗数据采集系统的开发应用(10-16)