一种基于SC89F516的热源自动跟踪系统设计方案
时间:08-12
来源:互联网
点击:
步进电机旋转角度的计算。由于步进电机的转动时靠电平一步一步执行的。其工作方式有A-B-C-D和A-AB-B-BC-C-CD-D-DA-A等几种节拍的运行方式。步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。这两个概念清楚后,我们再来计算转速,以基本步距角1.8°的步进电机为例(现在市场上常规的二、四相混合式步进电机基本步距角都是1.8°),四相八拍运行方式下,每接收一个脉冲信号,转过0.9°,如果每秒钟接收400个脉冲,那么转速为每秒400*0.9°=360°,相当与每秒钟转一圈,每分钟60转。
4.软件设计
4.1程序流程图

4.2程序流程图的说明
该流程图设计是按照,项目所需的功能实现的,其中有逻辑电平的判断以及电机执行机构的电平输出。全面考虑了系统可能出现的疏漏。在防破解方面也作出了许多方面的算法考虑。
5.系统测试结果
5.1测试仪器:万用表、数字示波器
5.2测试方法:
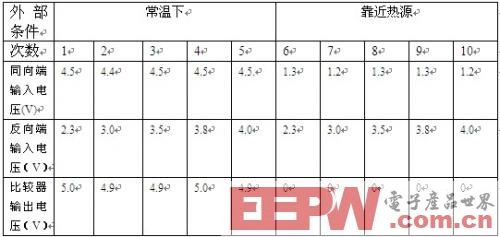
首先进行的是传感器模块的测试,在靠近热源时,测量LM393的引脚电平的高低。在测试时如果未能达到相应引脚电平的变化那么就必须通过调节电位器,使LM393同向端与反向端的电压最靠近。是系统的灵敏度最高。
测量结果如下:
6.总结
由测试结果知道,本设计完成了该项目所需的全部基本要求。
- 关于RTX51 TINY的分析与探讨(05-30)
- 浅析8051模块化编程技巧(05-28)
- 基于DSP和单片机通信的液晶显示设计方案(07-20)
- 锁相环控制及初始化简析(08-27)
- 基于MSP430自动胀管控制器的研究(09-07)
- 嵌入式C实现延时程序的不同变量的区别(03-01)