一款具有倾斜补偿功能的三轴磁阻电子罗盘设计
(11)
根据最小二乘原理求取最小二乘解。
5项罗差校正公式,即式(10)实现了对圆周误差、半圆误差和象限误差的补偿,但传感器不对称误差并未得到补偿。经过对误差特性曲线的分析,是3倍角罗差项分量偏大所致,为提高精度,增加3倍角罗差项,构成7项罗差校正公式,即:
△φ=A+Bsinφ+Ccosφ+Dsin(2φ)+Ecos(2φ)+Fsin(3φ)+Gsin(3φ) (12)
实验表明,增加3倍角罗差项可提高精度,但效果有限,且会增加单片机系统负担,故最终选择5项罗差校正公式进行罗差校正。
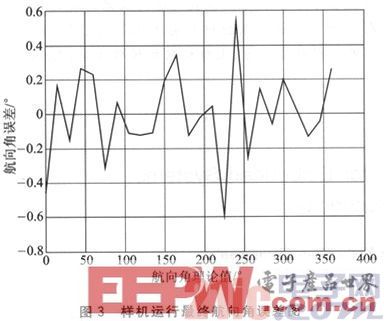
样机在0~360°范围内,每隔15°对共24个实验点进行测试,得到24组采样数据,进行罗差修正。对基于椭圆假设原点修正后的X、Y轴采样数据,采用基于最小二乘24位置罗差补偿法,样机运行一周得到最终航向角的误差如图3所示。
?
由图2、3可知,经过基于椭圆假设原点校正后的航向角误差可控制在±3°以内,在此基础上对校正后的X轴、Y轴采样数据,采用基于最小二乘24位置罗差补偿法,航向角误差可稳定在±0.6°,可见该误差补偿方法效果较好,同时因该方法利用的是现场的采样数据,实时性也较好。
结语
本设计的电子罗盘样机采用三轴磁阻传感器HMC1043和MEMS加速度计ADXL203研制而成,系统成本低,体积小,功耗低。利用地球磁场测量航向,易受外界磁场干扰,结合经典的椭圆假设法和基于最小二乘24位置罗差补偿法,提出一种新的补偿方法对误差进行修正。实验证明,该误差补偿算法在不用额外增加硬件复杂度和软件计算量的前提下,能有效地将航向角误差稳定在±0.6°,补偿效果良好,精度较高。需要指出的是,该补偿算法的误差补偿结果是在水平状态下得出的,当俯仰角或翻滚角较大时,修正后的航向角误差会增大,如何更好地解决这一问题是今后工作的方向。
- 基于DSP的数字式MEMS加速度传感器的设计与应用(04-17)
- 基于ARM-Linux的微惯性单元数据采集与处理(05-15)
- DSP在MEMS陀螺仪信号处理平台的应用(01-06)
- 基于DSP的MEMS陀螺仪信号处理平台系统的设计(04-21)
- 基于DSP的数字式MEMS加速度传感器ADXL203的系统设计与应用(07-06)
- 集成晶体的可编程时钟可提供多种设计优势而无性能折衷(07-10)