基于ARM-Linux多功能机器人的设计
时间:09-12
来源:互联网
点击:
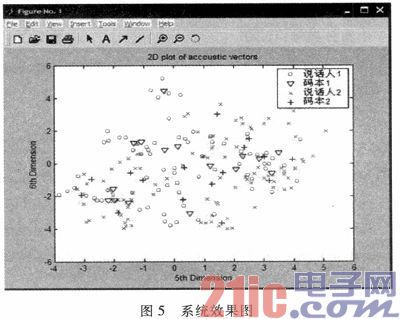
监控。将收集的语音信号通过MATLAB进行仿真我们可以得到一些不同颜色的符号,即两个语音文本的比对结果。图5为系统测试的效果图。实验测试证明了该方案可行性高,稳定性强。
4 结论
基于S3C2440处理器和嵌入式Linux操作系统构造一个具有定位导航、寻踪避障、物体定位、特征检测、目标识别、运动跟踪、实时监控等功能的智能移动机器人,系统体积小、成本低、功耗低、安装简便、稳定可靠、便于管理,远程客户端通过浏览器便可完成监控操作,能够适应多种需要远程监控的领域,如银行、仓库、视频会议、远程教育、智能小区监控等领域以及各种工业场所等。并实现过程中采用了模块化的思想,使系统具有良好的开放性,有利于功能扩展和系统升级。
ARM Linux 视频采集 语音识别 无线传输 相关文章:
- Linux嵌入式系统开发平台选型探讨(11-09)
- 基于ARM体系的嵌入式系统BSP的程序设计方案(04-11)
- 在Ubuntu上建立Arm Linux 开发环境(04-23)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- SQLite嵌入式数据库系统的研究与实现(02-20)
- 革新2410D开发板试用手记(04-21)