基于AVR ATMega16 的PID控制算法程序
时间:09-18
来源:互联网
点击:
Mx = 0.0;
if(PID->Mn > 1.0)
{
myMx = 1.0 - (PID->MPn + PID->MDn);
}
else if(PID->Mn < 0.0)
{
myMx = -(PID->MPn + PID->MDn);
}
return myMx;
}
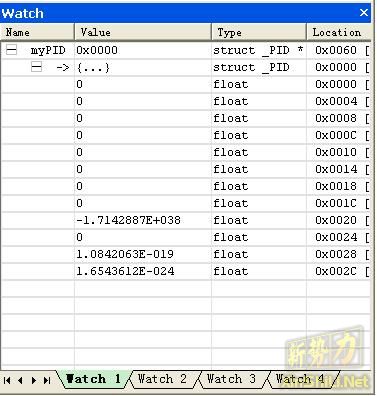
运行到PID初始化函数:void init_myPID(void)时的仿真结果如下:无法全部初始化为0
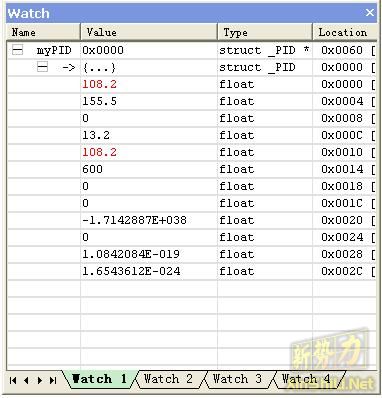
运行到:
myPID->SPn = 155.5;
myPID->Kc = 13.2;
myPID->Ts = 0.2;
myPID->Ti = 600.0;
myPID->Td = 0.0;
myPID->PVn = 108.2;
重新赋值后,部分参数Ts并不为0.2
- Flash损耗均衡的嵌入式文件系统设计(06-01)
- 锁相环控制及初始化简析(08-27)
- 基于AVR单片机的ISP1362OTG设计(09-06)
- 基于AVR单片机的串口转FSK的通信模块设计(01-23)
- 案例分析:基于AVR32的隧道环境监测系统(03-18)
- 科技帮我们远离灾难:灾难检测飞行器(03-18)