AT90CAN128的双机热备结构继电器驱动系统设计
引言
近年来,微小型化的单片机技术发展日新月异,广泛应用于很多领域。在铁路行业,结合单片机技术的高可靠性系统得到了越来越多的应用和重视。安全型继电器是铁路信号设备中的重要器件之一,其可靠性和安全性是铁路运输自动控制、远程控制信号设备正常使用的必要条件。因此,对于在铁路等重要场合使用的安全型继电器,需要采用高可靠性的驱动电路系统。本文利用AVR单片机设计出一种具有高可靠性的继电器驱动系统,具有实时性强、结构简洁、成本低等特点。
1 冗余结构
1.1 结构介绍
本系统需要采用一定的冗余技术来保证系统的高可靠性和高安全性。目前发展较为成熟的冗余技术主要有双机热备结构和二乘二取二冗余结构。这两种结构在可靠性、可用性、安全性等方面相比单机系统有着各自的特点和优越性,在铁路、工业等领域有着广泛的应用。
双机热备系统一般由两个具有相同功能的子系统构成,接有可选的比较器和主备切换器,并能进行故障检测。二乘二取二冗余结构由4个子系统组成,同样有比较器和主备切换器,两两比较输出后再次比较输出,其可靠性更高;但是对于小型系统,与双机热备系统相比要耗费更多的资源,成本加倍。因此,本系统采用双机热备系统。
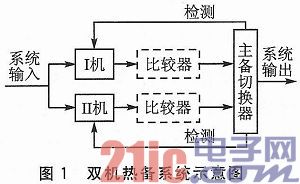
双机热备系统结构示意图如图1所示。它的工作方式一般有3种:主备机模式、互备模式和双机双工模式(即双机冗余模式)。3种模式下的两个子系统均加电工作,每个子系统都具有故障检测和诊断功能,而且3种结构均具有主备切换功能。但主备机模式下只有一个子系统能够控制被控对象,另一个子系统处于待命状态;互备模式为两子系统之间互相备份数据,但执行的是不同的任务,在一台故障时,另一台接收故障机的任务并继续执行;双机双工模式的两个子系统均处于活动状态,均能控制被控对象,同时进行工作并完
成同样的功能,在输出前进行比较,结果一致则输出,不一致则报错,而主备机模式和互备模式时,系统在运行过程中两个单元的运行结果不进行比较。
1.2 结构选择
本系统的主要功能为利用单片机系统驱动某型号安全型继电器,可以考虑的热备工作模式为主备机模式或双机双工模式,因而需比较两种模式的可靠性。
系统的可靠性R(t)为时间和失效率的函数,指产品在规定时间内和规定条件下,完成规定功能的概率。失效率指的是在规定时间内和规定条件下的产品失效的概率,一般用λ表示。系统的可靠性常随时间的增加而减少,一般用平均无故障工作时间(MTBF)来衡量。MTBF指系统相邻两次故障间的平均工作时间,它的值为系统的可靠性R(t)的期望。
在此,假设单机系统寿命服从指数分布,则第i个子系统的寿命即可靠度函数为Ri(t)=e-λt,则可知单机的平均无故障时间为
。
主备机模式下,一个子系统工作,另一个不工作,它的系统可靠度和平均无故障工作时间分别为:

双机双工模式可看作两个子系统的并联,则此模式下系统的可靠性取决于两个子系统中寿命较长者,其可靠度函数和平均无故障工作时间分别为:
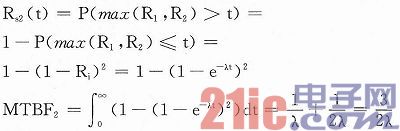
可以看出,相比单机系统,两种模式下的双机热备系统的可靠性均有显著提高,其中主备机模式下提高了3倍,双机双工模式下提高了1.5倍。因此,从保证系统更高可靠性的角度来看,主备机模式具有一定优势,故本系统采用主备机模式。
2 系统概述
2.1 硬件结构
本系统选用Atmel公司的AT90CAN128单片机作为主控芯片,其内部已经集成了CAN控制器,因此无需使用CAN控制器SJA1000,只需选用TJA1050作为CAN高速收发器,大大简化了电路。其系统结构如图2所示。
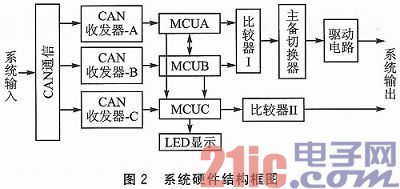
本系统采用3片AT90CAN128单片机作为核心控制芯片,其中MCUA和MCUB构成双机热备系统,MCUC用于监测和状态显示。单片机MCUA和MCUB互为主备关系,需要接收并处理上位机发送进来的CAN通信信息,对信息进行比较同步处理,进而通过驱动电路驱动某安全型继电器。驱动电路可包含多组,每一组控制一个继电器,电路由主MCU控制。MCUA和MCUB把相关监测信息通过串口通信传送给MCUC,MCUC监测A和B是否工作正常,并将其工作状态通过LED显示灯进行状态显示。3个CPU相互之间由串口进行通信,并通过CAN总线与上位主机进行通信。这样,整个系统就形成两套MCU控制回路构成主备关系,一套控制回路进行监测的系统架构。
2.2 软件结构
程序采用C语言模块化设计,C语言作为一种结构式的高级语言,具有表达方式灵活、可移植性强、代码质量高等优点,模块化的设计也增强了程序的可读性。其主程序流程图如图3所示。
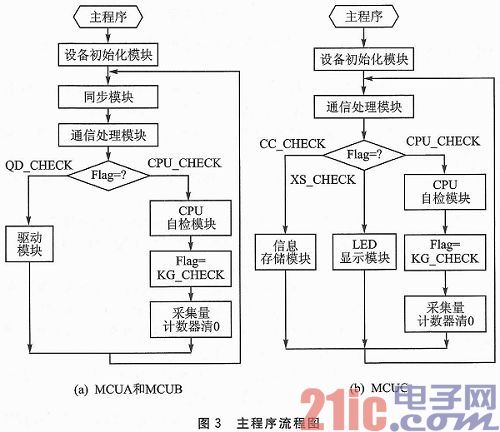
为了满足高可靠性、安全性的要求,程序中对MCU加入了CPU自检模块,因而3个CPU共同具有的模块包括设备初始化
双机热备 AT90CAN128 驱动系统 安全型继电器 可靠性 相关文章:
- 基于AVR单片机的某车型CAN总线系统设计(01-03)
- 基于AT90CAN128单片机的某车型CAN总线系统设计(12-03)
- 基于DSP的CANopen通讯协议的实现(01-18)
- 基于dsPIC30F的脉冲氙灯驱动系统的设计方案(04-16)
- 开关磁阻电机驱动系统和变频器调速电机系统的特性比较(12-19)
- 适用小功率电机驱动系统的MOSFET逆变模块(12-14)