32位微控制器实现先进控制技术
时间:10-22
来源:互联网
点击:
控制流程如下:
(1)主程序部分(Main Routine)。
① WT58F032复位;
② WT58F032芯片初始化设定;
③ 电机停止运转;
④ Check启动信号是否为“真”—如为真”,进入初始化电机配置及使能中断;如为“假”,则回到电机停止运转状态。
(2)中断服务程序(Interrupt Service Routine)。
① 中断服务程序启动;
② 输入捕捉单元/转子区间计算;
③ 上述“②”中计算的结果,输出给转速计算单元及电机相位计算单元;
④ 上述“③”中计算出来的转速,输出给电机相位计算单元及PID控制器;
⑤ 上述“④”中计算出来的电机相位及PID输出给正弦波发生器,以产生正弦波。
图2为基于WT58F032的SVPWM控制图2:WT58F032为基础的SVPWM控制输出波形。输出波形(M形状)。由图可看出,SVPWM的线电压利用率相较于一般的PWM会较高,因此能达到节能的效果。
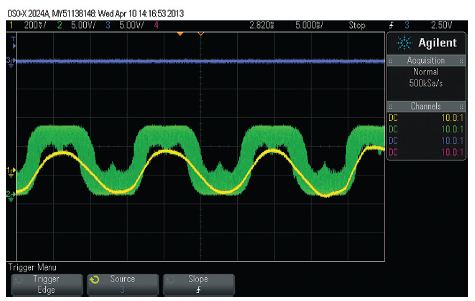
图2:WT58F032为基础的SVPWM控制输出波形。
总结
伟诠电子所提出的高性价比3 2 位微控制器, 除了有高运算能力的3 2 位R ISC CPU 及内置的一个在一个指令周期就可完成32b×32b乘法运算的快速乘法器外,亦集成了针对电机控制所设计的外围电路,包括高速ADC、高速及多模式操作PWM、PWM触发ADC、高速比较器、QEI等。另外,考虑到工业控制的需求,此芯片支持宽压工作(可运行于2.0V~5.5V),且有极佳的抗噪声能力,非常适合用在高性能电机控制系统中。
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)