32位微控制器实现先进控制技术
根据美国能源局的统计,全球的能源约一半是被电机所消耗,因此如何改善电机控制系统的耗能便成为一个重要的课题。要降低电机的耗能,除了电机由交流电机走向直流无刷电机(BLDC)及电机本体的能效设计由IE1走向IE3之外,最重要的就是要有一个高性价比、高性能,且完全针对电机控制的专属微控制器。
藉由一个针对电机控制的专属高性能微控制器,即可实现先进的控制算法。导入先进的控制算法,除了可以让系统达到节能之外,亦可以让整个控制系统在无传感器的情况下,因应负载的变化做出快速平滑的反应。传感器的配置,会增加组件及制造成本,而且很多场合是无法放置传感器的,例如当压缩机内有化学物质以及一些产品因空间太小而无法放置。本文就是使用一个32位微控制器来实现先进的磁场定向控制(Field Oriented Control,FOC)、高频电压注入技术及空间矢量PWM(SVPWM)控制。
FOC
FOC又称矢量控制(Vector Control),FOC发明的初衷,就在于想把交流电机的控制方式转换成直流电机的控制方式,直流电机的控制较简单,通过励磁电流和转矩电流的分别控制,即可简单且准确地控制电机电磁转矩。
对感应电机进行磁场和转矩的解耦:交流异步电动机调频时电压不变,磁场会发生变化,调压的时候不调频,磁场也会发生变化,因此V/F只是一种非常粗略的控制磁场的方式,根本达不到磁场的准确控制;而FOC可以实现相对更准确的磁场控制,但是FOC需要较高运算能力的微控制器。图1是以伟诠电子32位微控制器为基础的FOC系统图,而针对内环每一次的ADC中断,进行如下动作:
· 利用Clarke变换,将相电流由静态的三相变换成静态的两相电流。
· 利用Park变换,将静态的两相电流转换成动态的两相电流(旋转坐标系)。
· 利用滑动模态(Sliding Mode)控制器,计算出电机的速度及位置。
· 使用P I 控制器,针对速度及电流进行控制。
· 利用Park逆变换,将动态的两相电流变换成静态的两相电流(静止坐标系)。
· 利用Clarke逆变换,将相电流由静态的两相变换成静态的三相电流。
· 更新PWM输出占空比。
· ADC中断结束。
高频电压注入估计
电机的启动是P M S M 控制中的重要环节,PMSM的FOC系统通过施加与转子磁场相垂直的转矩电流来确保电机的顺利启动,但这需要获知电机初始位置。大部分无位置传感器控制无法预知转子初始位置,一般采用开环启动或者将电机定位到预定位置启动。开环启动因不同角度起转,常发生的状况有反偏、卡顿等状况,而电机预定位要求则在很多产品中是不适用的。
针对PMSM零速/低速下的无位置传感器控制(图1),为了解决低速时转子位置和速度估算不准确的问题,一般均采用由美国威斯康辛大学的M.Corley及R.Lorenz两位教授于1996年首先提出的高频信号注入法,目前研究较多的是高频电压注入法。该方法是基于电机的凸极特性,在电机定子中注入高频电压信号,通过对高频电流响应进行特定的信号处理(滤波、角度估计器)来获得转子位置信息。
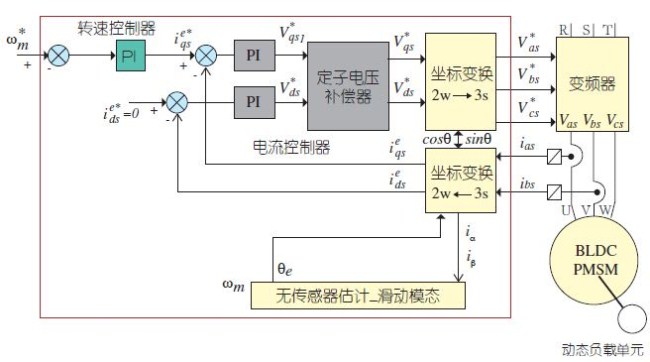
图1:以WT58F032为基础的磁场定向/无感测控制系统架构图。
按照电压注入方式的不同,高频电压注入法可分为以下两类:(1)旋转高频电压注入法—在定子坐标系中注入旋转高频电压信号,则高频电流响应的负序分量中含有转子位置信息;通过对该信号进行解调获得电机转子位置。(2)脉动高频电压注入法—在估算的旋转坐标系注入脉动高频电压信号,则电流响应的高频分量中将包含位置估算误差;通过对该高频电流信号的处理,使得估算位置收敛于实际位置。
空间矢量脉宽调制
空间矢量PWM (SVPWM)的工作原理是利用三组半桥逆变器,经由PWM调制电压矢量来合成电机定子电流。此合成电流在定子线圈上产生的定子磁通矢量与转子磁通相互作用产生转矩,使电机旋转。SVPWM因是以合成定子磁通矢量来决定三组半桥逆变器的切换时序,所以命名为空间矢量脉宽调制。这种调制方法是控制电压矢量使得电机气隙旋转磁通矢量轨迹逼近一个理想的圆,且有最小的磁通波动,其转矩纹波(Torque Ripple)最低,因此在开路控制的情况下,电机转速波动亦最小。表1为电机驱动电路的三组半桥逆变器功率开关器件,因为空间矢量脉宽调制开关控制并无上下开关同时导通的定义,所以实际上可视为两种状态开关时序(上开关OFF、下开关ON,或上开关ON、下开关OFF)。因此,三组功率开关器件,总共可产生八种开关状态组合。
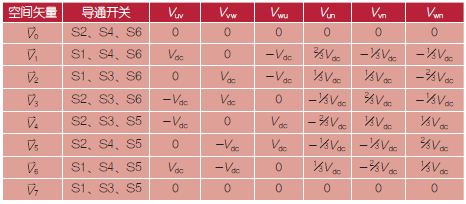
表1:SVPWM功率开关切换状态、线电压、相电压与空间矢量之关系表。
SVPWM控制系统
以伟诠电子WT58F032微控制器为基础的SVPWM控制系统,
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)