一种声定位自动泊车系统设计
隔T的选择。由于超声波和无线电信号是同时发出的,如果时间间隔T太小,则会导致接收器在接收到声波信号之前又接收到下一次发射的无线电信号,导致无法测量声源的位置;如果时间间隔T太大,则在一定时间内对距离的测量次数过少,所测的结果实时性差。本停车场的对角线长不超过60 m,可得超声波最大传播时间tmax为:
其中,v0为声波在空气中传播的速度,约为340 m/s。故,时间间隔T应取:T≥tmax。
在一定范围内,时间间隔应越小越好,以增强检测的实时性,故取时间间隔T为tmax。
考虑系统本身的要求,本方案采用了二维的定位方法。假设移动声源的初始位置在S点,由时延估算法可以得到SA和SB的值,AB的距离在停车场设计时已经规划好,为已知量。通过下面的算法可以得到小车在平面直角坐标系XOY中的坐标:
2.3 障碍物检测模块
障碍物检测模块用来检测车辆前方或后方是否有障碍物,比如前后驶来的车辆等。在车的最前端中央和最后端中央分别安装超声波发射接收装置,通过超声波发射装置发出超声波,根据接收器接收到超声波的时间差就可以得到障碍物的距离。超声波发射器向某一方向发射超声波,在发射时刻同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。根据计时器记录的时间t,就可以计算出车辆距障碍物的距离S:
超声波测距框图如图5所示。
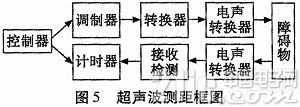
需要注意的是此超声波的频率不能和车顶部用来定位用的超声波频率相同,否则会引起干扰,发射的时间间隔也需特别注意。
2.4 车辆运行自动控制模块
车辆运行自动控制模块用来规划自动泊车路径,制定车辆运动策略,将车辆驱动到目标停车位。
最小转弯半径是指:当转向盘转到极限位置,汽车以最低稳定车速转向行驶时,外侧转向轮的中心平面在支承平面上滚过的轨迹圆半径。它在很大程度上表征了汽车能够通过狭窄弯曲地带或绕过不可越过的障碍物的能力。转弯半径越小,汽车的机动性能越好。假设车辆的最小转弯半径为Rmin,当车辆在道路上转弯时,均以此最小转弯半径来执行,以降低对停车场空间的要求。
为了保证车辆准确沿着直线运动,需要使用惯性导航仪的反馈来实现转向轮的方向校正;车辆的位置可由声源定位模块实时检测并传给车辆内的自动运行控制器;最后,使用步进电机分别控制车辆的方向盘、油门、刹车来控制车辆的运动、停止、加速、减速。自动泊车过程中,需要不断监视车的情况,在车辆的前后中央处分别安装超声波发射接收装置,来实时测定车辆的前部和后部与可能出现的障碍物的距离,一旦出现意外情况,车辆运行控制器可以立刻控制车辆停止,避免发生危险。
车辆运行控制器接收到主控中心传来的目标车位坐标和车辆所处的坐标后,结合停车场的车位、道路、环境等预知的实际情况,规划出泊车路径,制定泊车策略,控制车辆的前进、后退、油门、转弯、刹车等,使车辆最终停入目标车位。
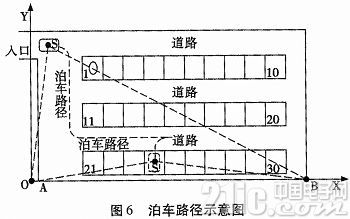
车辆转弯时可控制步进电机将方向盘打到最大位置,以最小转弯半径转弯。本方案设计的车辆停入车位的过程属于车辆行驶方向与车位垂直的情况,倒车入车位的步骤可总结如下:
1)控制车辆向前驶过停车位,使自己的车辆中心处与要停入的车位中心在X轴上的距离为最小转向半径;
2)原地将方向盘往相反方向打到最大位置,慢速后退,直至车辆方向与车位方向平行;
3)回正方向盘,让车平行后退,直至到达目标位置。
假设目标车位为24号车位,可做如图6所示的路径规划:
最后,由车辆运行控制器来控制车辆的泊车过程,直至泊车入位。在泊车过程中,一旦遇到意外情况(例如前方或后方又驶来一辆车),车辆运行控制器可根据车辆前后中央安装的超声波发射接收装置探测到的距离信息立刻控制车辆停止,避免发生危险。
3 结束语
本文从原理层面设计了声定位自动泊车系统的工作过程,为自动泊车系统的工程实现提供了思路。本方案具有以下特点:
1)本方案集传感器技术、自动控制、数据处理等多种高技术于一体。设计合理,且可以实时检测障碍物,避免发生危险;
2)本方案采用超声波和平面直角坐标系定位,给出了位置标定的一种新方法;
3)本方案中还可以在小车周围安装超声波传感器或摄像头以及其他装置来在野外环境(非专门停车场环境)下,寻找足够的空间来当作停车车位,实现自动泊车。
- 采用ARM的PWM模块的超声波检测系统的设计浅析(11-20)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)