一种声定位自动泊车系统设计
现代化城市交通拥堵,泊车要求较高的驾驶技术,且可能导致交通阻塞、驾驶员神经疲惫和保险杠撞弯等不良后果。如果利用微机控制的自动泊车系统,则可以较好地实现
车辆的安全停泊,乃至最终实现汽车的自动驾驶。现代科学技术的快速发展,尤其是计算机技术和传感器与检测技术的快速发展为自动泊车提供了可能。自动泊车系统可以解决驾驶员尤其是初学者的烦恼,提升汽车的主动性安全水平,减少泊车入位所消耗的时间,减缓停车场的拥堵程度,提高停车场的利用率。
目前,很多的停车场车位引导系统能够引导车辆顺利进入目的车位,但还需驾驶员根据停车场显示屏中所显示的车位引导信息来驾驶车辆,没有实现车辆运行自动控制和自动泊车。本文所设计的方案首先检测出每个车位是否有车辆停放,由给定的停车车位分配方法得到下一辆车进入停车场之后所要停放的车位;以声源定位为基础,实时测量出车辆在停车场中所处的位置,通过无线电通讯,与车内的车辆运行自动控制系统进行信息传输,控制车辆的运行,最终实现车辆的自主泊车。
1 总体方案设计
1.1 停车场及车辆模块设置
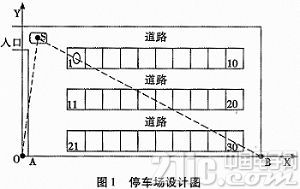
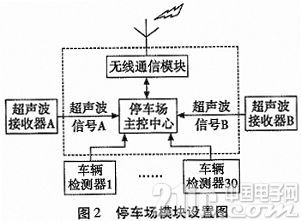
设计停车场的车位分布(如图1所示)。停车场共设30个车位,每个车位下边埋有车位检测器,用来检测车位的占用情况。停车场四周的边框为停车场的边界,建立平面直角坐标系XOY(见图1)。在A点和B点分别安装超声波接收器,用以检测车辆发出的超声波来对声源(车辆)进行定位。在停车场中还设有无线电通信设备,以实现与车辆的无线通信。停车场主控中心负责将地面各个传感器得到的信息进行处理,并控制无线通信模块与车辆进行通信。停车场的模块设置及信号关系如图2所示。
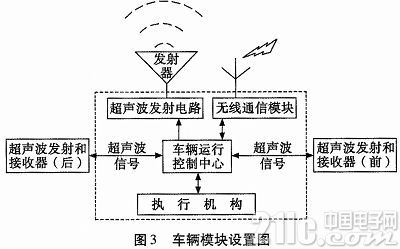
在车辆顶部中央装有超声波发射器,用以发射超声波来进行声源定位。在车辆的头部和尾部中央处安装有超声波发射接收装置,用来检测车辆可能遇到的障碍物或其他车量,避免发生危险。在车辆的顶部还装有无线电发射和接收装置,以实现和停车场主控中心的无线通信。车辆各模块设置及信号关系如图3所示。
1.2 系统工作流程
系统工作流程如下:
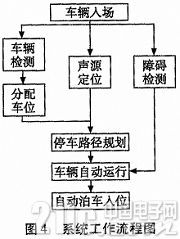
当车辆进入停车场之后,启动自动泊车系统。车辆检测器检测每个车位是否被占用,将车位占用信息传给停车场主控中心来进行车位分配,得到要停入的车位坐标;声源检测模块实时进行声源定位,得到车辆的坐标信息并传给主控中心;停车场主控中心通过无线通信模块将以上两个坐标信息传给车辆内的车辆运行控制中心,车辆运行控制中心根据得到的坐标信息和停车场的车位、道路分布情况,规划出泊车路径,控制车辆自动运行、停车入位。在车辆运行过程中,车辆前方和后方的超声波发射接收装置实时检测车辆前后是否有障碍物。一旦发现有障碍物,则立即通过车辆运行控制中心实施刹车,避免发生危险。
系统工作流程如图4所示。
2 各模块设计
2.1 车辆检测模块
车辆检测模块主要用于检测车位上方是否已有车辆停放。目前停车场一般采用超声波探测器或车辆探测器来进行检测。
超声波探测器工作原理:在停车场上方安装超声波探测器,由上向下发射超声波,对从地面或车辆上反射回来的反射波的区别,通过处理器进行分析,从而做出有无车辆的判断,并输出相关信号。
车辆检测器工作原理:在室外停车场停车处地面下方埋放地感线圈,对线圈上方有车或无车时的电感量的区别,通过车辆检测器的处理器进行分析,并输出相关信号。
超声波探测器在室外使用时受其它声源干扰较大,而且本方案在声源定位模块和障碍物检测模块均使用了超声波,因此在此处采用车辆检测器。车辆检测器输出车位是否被占用的信号给停车场主控中心,由停车场主控中心根据预定的车位分配方案分配要停入的车位,得到要停入车位的坐标信息。
2.2 声源定位模块
声源定位模块用来实时检测声源的位置,得到车辆的坐标信息。
移动声源:在车辆的顶部安装超声波发生器。鉴于系统工作环境复杂,声波频率多而杂,若使用频率较低的声波极易受到干扰,造成车辆坐标检测错误。因此,选用超声下的高频段频率40 kHz,提高系统的抗干扰能力。在发射声波的同时发射无线电信号,通知停车场主控中心,以开始计时。
由于声源定位模块发射的信号为超声波信号,且整个系统是完全协同工作的模式,为了降低系统的复杂度与系统可实现性,可采用比较传统的时延估计方法,即利用车辆发送超声波信号的同时发出无线电信号,告知停车场主控中心,停车场主控中心及时打开定时器,当主控中心判定收到声波信号时关闭定时器,然后计算两者的差值△t,即可获得时延估计值。
超声波发射的时间间隔:需要注意超声波发射时间间
- 采用ARM的PWM模块的超声波检测系统的设计浅析(11-20)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)