基于摄像头的智能小车寻迹系统设计
根据赛道的实际情况做适当校正。
5.2 大s弯和小s弯的判断
跑道分为大s弯和小s弯。通过实际实验,小车的舵机在改变角度的时候,小车会减速,因此小车的舵机改变角度的大小和次数都会影响最后的比赛成绩。在小s弯时,小车摄像头可以照到全部,取平均值后相当于是直道,小车舵机可不改变方向而直线行驶从而提高速度。在大s弯时,由于大弯不能在完整的的一个视野范围内,小车将取平均值后偏离直道,小车舵机将改变方向行驶。
5.3 十字交叉路线的判断和起跑线的识别
两个黑色引导线垂直相交,经ad采样后,横向灰度值特点为黑色灰度值都在同一行,经查找由黑到亮变化的灰度值是没有的,因而此处黑点坐标几乎接近中心位置,不会对引导线的位置产生影响,这就实现了小车不发生错误通过十字交叉路线。
小车起点如图5所示,特点是先由黑变亮,再由亮变黑。所以可根据这样的特点进行起点识别。当采样的灰度值由黑变亮再由亮变黑可判断为起跑线。但是这样判断可能会把十字交叉路线或窄道的三角形标记误判为起点。为了准确判断需要进行3次以上具有起点特点时才可判断。
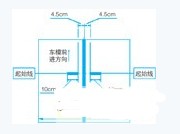
图5 起点线
6 结束语
本系统采用基于coms摄像头的路径识别方法,通过摄像头采集的道路信息送入单片机处理,通过算法提取出赛道黑线中心,识别弯道、窄道、坡道、起跑线等信息。通过大量试验及参加大赛结果表明,本智能小车寻迹系统能够准确识别道路情况,结果较为理想。该系统满足实时、安全、温定快速的要求,具有广阔的应用前景,是当前智能车辆导引技术研究的主流方向和发展趋势。
作者简介
冯 震(1982-) 男 工学硕士/讲师,网络与智能控制方向。
参考文献
[1] 邵贝贝.单片机嵌入式应用的在线开发方法[m]。北京:清华大学出版社,2007。
[2] 张海山,李伟.视频采集与处理方法[j].河北理工学院学报,2007.2
[3] 贾秀江,李颢.摄像头黑线识别算法和赛车行驶控制策略[j].电子产品世界,2007(5)
[4] 卓晴,黄开胜,邵贝贝等.学做智能车----挑战“ 飞思卡尔”杯[m]。北京:北京航空航天出版社,2007。
- Linux系统下USB摄像头驱动程序开发(04-25)
- Linux系统中如何正确安装摄像头驱动(04-25)
- 基于WinCE的ARM视频监控系统(11-14)
- 完整解决方案打包奉送:多点触控智能家居平台软硬件实现(07-25)
- 给弱势群体的一份关爱,语音识别助老助残服务系统的完整解决方案(06-04)
- 大热的虹膜身份识别系统设计,提供软硬件参考解决方案(06-04)