基于C8051F040的CAN总线系统智能节点设计
1 智能节点硬件设计
C8051F040中内置CAN总线协议控制器,只要外接总线驱动芯片和适当的抗干扰电路就可以很方便地建立一个实用的CAN总线智能测控节点。本文采用PH ILIP公司的TJA1050T CAN总线驱动器,硬件原理图如图1所示。
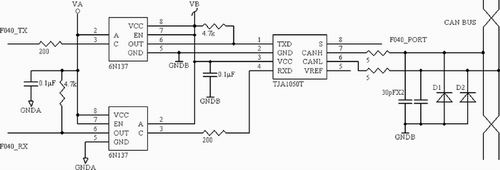
图1智能节点电路
图1中C8051F040 的CAN信号接收引脚RX 和发送引脚TX 并不直接连接到TJA1050T 的RXD和TXD端,而是经由高速光耦6N137进行连接,实现CAN总线各节点的电气隔离。为了实现真正意义上完全的电气隔离,光耦部分的VA和VB必须通过DC-DC 模块或者是带有多个隔离输出的开关电源模块进行隔离。为防止过流冲击, TJA1050T 的CANH和CANL引脚各通过一个5Ω 的电阻连接到总线上。并在CANH 和CANL 脚与地之间并联2个30pF 的电容,用于滤除总线上高频干扰。而防雷击管D1和D2可以起到发生瞬变干扰时的保护作用。
TJA1050T的8脚连接到C8051F040的一个端口,用于模式选择。TJA1050T有高速模式和静音模式,正常工作在高速模式;而在静音模式下, TJA1050T 的发送器被禁能,执行只听功能,可用于防止由于CAN控制器失控而造成的网络阻塞。
2 智能节点通信软件设计
2. 1 CPU对CAN寄存器的访问机理
C8051F040中的CAN寄存器分成3类: CAN控制器协议寄存器,消息对象接口寄存器,消息处理器寄存器。对于控制CAN主要功能的最重要的3个寄存器可以像单独的特殊功能寄存器( SFRs)一样采用直接访问的方式进行访问。它们分别是CAN控制寄存器,CAN测试寄存器和CAN状态寄存器。而对于其他一些寄存器则通过一个间接的指针机制进行访问。
访问方式为首先在CAN0ADR 寄存器中输入欲访问寄存器的索引号,然后通过CAN数据寄存器(CAN0DATH 和CAN0DATL) 访问该CAN寄存器。为加快对频繁访问的接口寄存器的访问速度,在访问索引范围0x08~0x12 (接口寄存器1)和0x20~0x2A(接口寄存器2)时有自动加1 功能。当CAN0ADR 中的索引号位于这两个范围之内时, CAN0ADR 在每次读/写CAN0DATL 时能自动加1,指向下一个CAN寄存器的16位字。当然,采用直接访问方式的寄存器也可以采用间接访问方式进行访问。
2. 2 CPU对消息对象的访问机理
C8051F040中的CAN模块为CAN总线通信提供了一个消息邮箱(Message RAM),消息邮箱中包含有32个独立的消息对象(Message Object),每个消息对象的ID校验码和验收滤波码均可以单独进行配置,用于消息的传送和接收。为防止CPU 访问消息邮箱和CAN消息接收传送之间的冲突, CPU并不直接访问消息邮箱中的消息对象,而是通过两组消息对象接口寄存器( IF1和IF2)来进行访问。
访问方法为,当CPU要对一个消息对象进行写入操作时,首先对寄存器组的命令屏蔽寄存器(CommandMask Register)进行设置,用于确定对消息对象的哪些域进行写入,然后对消息缓冲寄存器进行设置,最后在命令请求寄存器(Command Request Register)中写入欲写入的消息对象的号码,完成对消息对象的写入访问。
而读取的方法是,首先对寄存器组的命令屏蔽寄存器进行设置,确定消息对象的哪些部分将要被读出,最后在命令请求寄存器中写入欲读出的消息对象的号码,这样消息对象欲读取的内容就传入消息接口寄存器组中的消息缓冲寄存器中,供CPU读取。一般情况消息接口寄存器组1用于消息对象的写入,而寄存器组2用于消息对象的读出。
2. 3 CAN控制器通信软件的实现
一般情况下最基本的CAN总线节点的通信软件包括3个部分: CAN节点的初始化,消息的传送,消息的接收。
2. 3. 1 CAN节点的初始化
智能节点的初始化主要包括以下几个部分: CAN引脚输出方式的设置,波特率参数的设置,消息对象的初始化,以及当允许接收或发送中断时对相应中断允许位的设置。要进入初始化状态,必须设定CAN控制寄存器中的Init位为1。首先设置CANTX端口的输出方式,通过设置端口交叉开关寄存器3 (XBR3)中的位7CTXOUT选择CANTX端口是工作在漏极开路还是推挽输出方式下。默认情况下, CANTX引脚工作在漏极输出方式下。接着设置波特率。设定CCE位为1,将设置参数写入相应的寄存器,包括位定时寄存器和BRP扩展寄存器(低通信速率时使用) 。
然后通过消息对象接口寄存器组( IFX)对消息对象进行设置。例如通过设置Dir确定这是一个发送消息对象还是一个接收消息对象;设置Xtd位确定是使用标准帧还是扩展帧,等等。如果允许接收中断或发送中断则必须设定TxIE 或RxIE位。对于不使用的消息对象可以通过设置它的MsgVal位为0加以禁止。在允许接收中断或者发送中断时,相应中断允许位必须被设置。这些位包括CAN控制寄存器的IE位, E IE2 寄存器的ECAN0位。最后复位Init和CCE 位完成设置。CAN节
- 基于C8051F040多路浸水时刻记录电路设计(01-18)
- 基于CAN总线的数字式自动找平控制系统设计(12-30)
- 高速SoC单片机C8051F040在双基色LED屏中的应用(03-13)
- C8051F040单片机在语音识别系统中的应用(08-13)
- 基于C8051F040单片机的承载平台平衡调整系统(06-14)
- 基于C8051F040单片机的CAN总线测试模式研究(04-23)