STM32的can现场总线实验心得分享
送的帧起始位的采样点位置被采样,并生成时间戳(标有时间的数据)。
接着又是怎样接收报文的呢?
接收管理
接收到的报文,被存储在3级邮箱深度的FIFO中。FIFO完全由硬件来管理,从而节省了CPU的处理负荷,简化了软件并保证了数据的一致性。应用程序只能通过读取FIFO输出邮箱,来读取FIFO中最先收到的报文。
有效报文
根据CAN协议,当报文被正确接收(直到EOF域的最后1位都没有错误),且通过了标识符过滤,那么该报文被认为是有效报文。
接收相关的中断条件
* 一旦往FIFO存入1个报文,硬件就会更新FMP[1:0]位,并且如果CAN_IER寄存器的FMPIE位为1,那么就会产生一个中断请求。
* 当FIFO变满时(即第3个报文被存入),CAN_RFxR寄存器的FULL位就被置1,并且如果CAN_IER寄存器的FFIE位为1,那么就会产生一个满中断请求。
* 在溢出的情况下,FOVR位被置1,并且如果CAN_IER寄存器的FOVIE位为1,那么就会产生一个溢出中断请求
标识符过滤
在CAN协议里,报文的标识符不代表节点的地址,而是跟报文的内容相关的。因此,发送者以广播的形式把报文发送给所有的接收者。(注:不是一对一通信,而是多机通信)节点在接收报文时-根据标识符的值-决定软件是否需要该报文;如果需要,就拷贝到SRAM里;如果不需要,报文就被丢弃且无需软件的干预。为满足这一需求,bxCAN为应用程序提供了14个位宽可变的、可配置的过滤器组(13~0),以便只接收那些软件需要的报文。硬件过滤的做法节省了CPU开销,否则就必须由软件过滤从而占用一定的CPU开销。每个过滤器组x由2个32位寄存器,CAN_FxR0和CAN_FxR1组成。
过滤器的模式的设置
通过设置CAN_FM0R的FBMx位,可以配置过滤器组为标识符列表模式或屏蔽位模式。
为了过滤出一组标识符,应该设置过滤器组工作在屏蔽位模式。
为了过滤出一个标识符,应该设置过滤器组工作在标识符列表模式。
应用程序不用的过滤器组,应该保持在禁用状态。
过滤器优先级规则
位宽为32位的过滤器,优先级高于位宽为16位的过滤器
对于位宽相同的过滤器,标识符列表模式的优先级高于屏蔽位模式
位宽和模式都相同的过滤器,优先级由过滤器号决定,过滤器号小的优先级高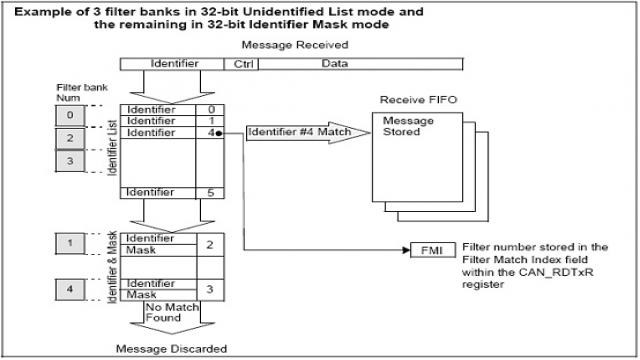
上面的例子说明了bxCAN的过滤器规则:在接收一个报文时,其标识符首先与配置在标识符列表模式下的过滤器相比较;如果匹配上,报文就被存放到相关联的FIFO中,并且所匹配的过滤器的序号被存入过滤器匹配序号中。如同例子中所显示,报文标识符跟#4标识符匹配,因此报文内容和FMI4被存入FIFO。
如果没有匹配,报文标识符接着与配置在屏蔽位模式下的过滤器进行比较。
如果报文标识符没有跟过滤器中的任何标识符相匹配,那么硬件就丢弃该报文,且不会对软件有任何打扰。
接收邮箱(FIFO)
在接收到一个报文后,软件就可以访问接收FIFO的输出邮箱来读取它。一旦软件处理了报文(如把它读出来),软件就应该对CAN_RFxR寄存器的RFOM位进行置1,来释放该报文,以便为后面收到的报文留出存储空间。
中断
bxCAN占用4个专用的中断向量。通过设置CAN中断允许寄存器(CAN_IER),每个中断源都可以单独允许和禁用。
发送中断可由下列事件产生:
─ 发送邮箱0变为空,CAN_TSR寄存器的RQCP0位被置1。
─ 发送邮箱1变为空,CAN_TSR寄存器的RQCP1位被置1。
─ 发送邮箱2变为空,CAN_TSR寄存器的RQCP2位被置1。
FIFO0中断可由下列事件产生:
─ FIFO0接收到一个新报文,CAN_RF0R寄存器的FMP0位不再是‘00’。
─ FIFO0变为满的情况,CAN_RF0R寄存器的FULL0位被置1。
─ FIFO0发生溢出的情况,CAN_RF0R寄存器的FOVR0位被置1。
FIFO1中断可由下列事件产生:
─ FIFO1接收到一个新报文,CAN_RF1R寄存器的FMP1位不再是‘00’。
─ FIFO1变为满的情况,CAN_RF1R寄存器的FULL1位被置1。
─ FIFO1发生溢出的情况,CAN_RF1R寄存器的FOVR1位被置1。
错误和状态变化中断可由下列事件产生:
─ 出错情况,关于出错情况的详细信息请参考CAN错误状态寄存器(CAN_ESR)。
─ 唤醒情况,在CAN接收引脚上监视到帧起始位(SOF)。
─ CAN进入睡眠模式。
工作流程大概就是这个样子,接着就是一大堆烦人的can寄存器,看了一遍总算有了大概的了解,况且这么多的寄存器要一下子把他们都记住是不可能的。根据以往的经验,只要用多几次,对寄存器的功能就能记住。
好了,到读具体实验程序的时候了,这时候就要打开“STM32库函数”的资料。因为它里面有STM32打包好的库函数的解释,对读程序很有帮助。
下面是主程序:
int main(void)
{
// int press_count = 0;
char data = &#
STM32can现场总 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)