ARM 中断状态和SVC状态的堆栈切换 (异常)
Arm的寄存器使用规则以及寻址指令:
R13
R14
R15
多寄存器寻址:
LDMIA R0!,{R1-R4}
执行以后的效果
R1
R2
R3
R4
堆栈寻址:
STMFD入栈指令,相当于STMDB
STMFD SP!,{R2-R4} 注意这个“!”的使用,在使用和不使用的情况下会有不一样的效果,在后面的代码中具体分析。
[SP-4]
[SP-8]
[SP-12] <——R2
LDMFD出栈指令,相当于LDMIA
LDMFD SP!,{R6-R8}
R6
R7
R8
补充说明:
LDMIA
LDMIB
LDMDA
LDMDB
•STMFD
•LDMFD
这些使用规则以及默认的表达方法是给编译器使用。但是在开发底层语言的同时,有必要知道这个么命名的规则和使用方法。初始化代码和部分关键代码是靠汇编实现。这些代码的理解不免和汇编打交道。因此了解一下基本的汇编规则还是很有帮助。
Arm的工作模式以及相关寄存器设置:
1,用户模式(usr)
2,快速中断模式(fiq)
3,外部中断模式(irq)
4,管理模式(svc)
5,中止模式(abt)
储及存储保护
6,未定义指令模式(und)[11011]:当未定义的指令执行时进入该模式,用于支持硬件
协处理器的软件仿真
7,系统模式(sys)
设置方法:
MRS R14,CPSR
MSR CPSR_c, R14
以上几种模式存在的意义在于不同模式下特殊的几个寄存器使用是有区别的。再svc模式下堆栈指针为sp svc中断模式下sp指针为 sp irq等。同样lr连接寄存器的内容也是有不同的含义。再不同模式切换中,lr寄存器保存的地址是由硬件完成,但是表示的是不同模式下的下一条指令,既返模式切换后的返回地址。
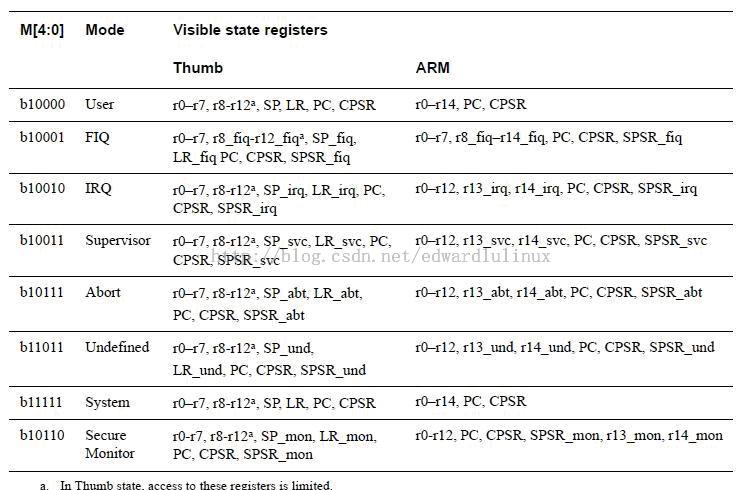
每一种模式对应不同的bank register。中文官方翻译不详。但是每一种模式要拥有自己独立的寄存器组。并且每一种模式使用和可见寄存器的数量也是不相同的。
模式切换过程中其实只针对spsr进行操作,而未涉及cpsr是的操作。这个过程之所以这样主要是参考ARM cortex A8的TRM。其中这样描述离开异常的情况:
Typically the return instruction is an arithmetic orlogical operation with the S bit set to
1 and rd = r15, so the core copies the SPSR back to theCPSR.
也就是说离开异常,从异常情况返回以后会自动把spsr的内同拷贝到cpsr中。所以在执行BL Lr指令之前使用的堆栈其实并位切换。
Linux中初始化:
1,
堆栈的概念是给C 语言编译以后的代码使用,因此从head.S一直到C语言的执行,就是start_kernel。
__mmap_switched:
1:
1:
ENDPROC(__mmap_switched)
注释1:
注释 2:
注释 3:
2,irq以及其他模式的初始化:
ARM中断状态SVC状态堆栈切 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)