红外遥控系统原理及单片机软件解码程序
- g=START_Judge();
- BOOT_REPEATING_CODE_Flag=BOOT_REPEATING_CODE_Judge();
- if(START_Flag&&!BOOT_REPEATING_CODE_Flag)
- {
- for(i=0;i<4;i++)
- {
- B0=H_L_LEVEL_Judge();
- B1=H_L_LEVEL_Judge();
- B2=H_L_LEVEL_Judge();
- B3=H_L_LEVEL_Judge();
- B4=H_L_LEVEL_Judge();
- B5=H_L_LEVEL_Judge();
- B6=H_L_LEVEL_Judge();
- B7=H_L_LEVEL_Judge();
- DATA[i]=TEMP_BIT;
- }
- for(i=0;i<4;i++)
- {
- SBUF=DATA[i];
- while(TI==0);
- TI=0;
- }
- }
- }
- }
- voidUART_Initial()
- {
- SCON=0x50;//SCON:模式1,8-bitUART,使能接收
- TMOD|=0x20;//TMOD:timer1,mode2,8-bitreload
- TH1=0xFD;//TH1:reloadvaluefor9600baud@
- //11.0592MHz
- TR1=1;//TR1:timer1run
- EA=0;//关闭总中断
- ES=0;//关闭串口中断
- }
- bitSTART_Judge()
- {
- bitTEMP_Flag=1;
- unsignedchari=0;
- //在正常无遥控信号时,一体化红外接收头输出是高电平,程序一直在循环。
- while(IR_Out==1);
- //重复10次,目的是检测在6876~8352微秒内如果出现高电平就退出解码程序
- for(i=0;i<9;i++)
- {
- DELAY_Us(800);//测试实际延时约为764~928us
- if(IR_Out==1)
- {
- TEMP_Flag=0;
- break;
- }
- }
- returnTEMP_Flag;
- }
- bitBOOT_REPEATING_CODE_Judge()
- {
- bitTEMP_Flag=1;
- while(IR_Out==0);//等待高电平避开9毫秒低电平引导脉冲
- DELAY_Ms(1);//测试实际延时约为1.007ms
- DELAY_Ms(1);//测试实际延时约为1.007ms
- DELAY_Us(200);//0.086ms
- DELAY_Us(200);//0.086ms
- DELAY_Us(200);//0.086ms
- //共计2.272ms
- if(IR_Out==0)
- {
- TEMP_Flag=1;//是连发码
- }
- else
- {
- TEMP_Flag=0;//不是连发码,而是引导码
- }
- returnTEMP_Flag;
- }
- bitH_L_LEVEL_Judge()
- {
- while(IR_Out==0);//等待地址码第一位的高电平信号
- DELAY_Us(800);//测试实际延时约为764~928us
- if(IR_Out==1)
- {
- DELAY_Ms(1);//测试实际延时约为1.007ms
- return1;
- }
- else
- {
- return0;
- }
- }
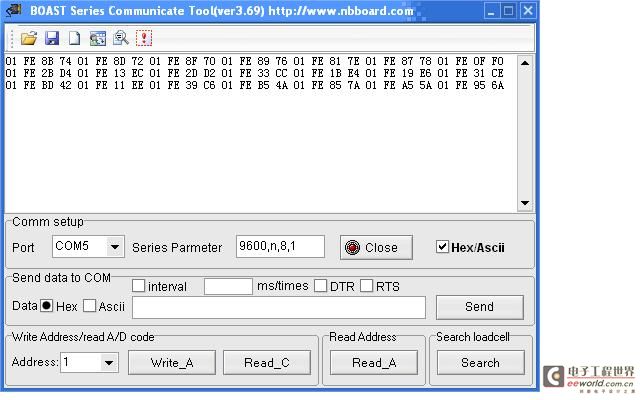
编辑如下:
01 FE 8B 74 --- 01 FE 8D 72 --- 01 FE 8F 70
01 FE 89 76 --- 01 FE 81 7E --- 01 FE 87 78
01 FE 0F F0 --- 01 FE 2B D4 --- 01 FE 13 EC
01 FE 2D D2 --- 01 FE 33 CC --- 01 FE 1B E4
01 FE 19 E6 --- 01 FE 31 CE --- 01 FE BD 42
01 FE 11 EE --- 01 FE 39 C6 --- 01 FE B5 4A
以上为对应按键的编码。
过程中存在问题:
一是如何有效的识别引导码和连发码,因为这个能直接影响到长时间按键,单片机的响应与否。这个问题,貌似我以解决,就是长时间按键后,单片机识别一次按键后,如果还是同一按键,就不与理睬。
还有一个问题就是,如果连续按下两次按键,该程序能够识别出,但是如果间隔很短,第二下按键的编码容易出错,容易变成这样:
03 FE 8B 74.。。。就是第一个字节出现误差,这个问题现在还未来得及解决。
还有就是本程序对于延时函数的精度要求很高,因为本身处理的脉冲就是MS级别的。所以需要严格的测试延时函数的实际延时时间:
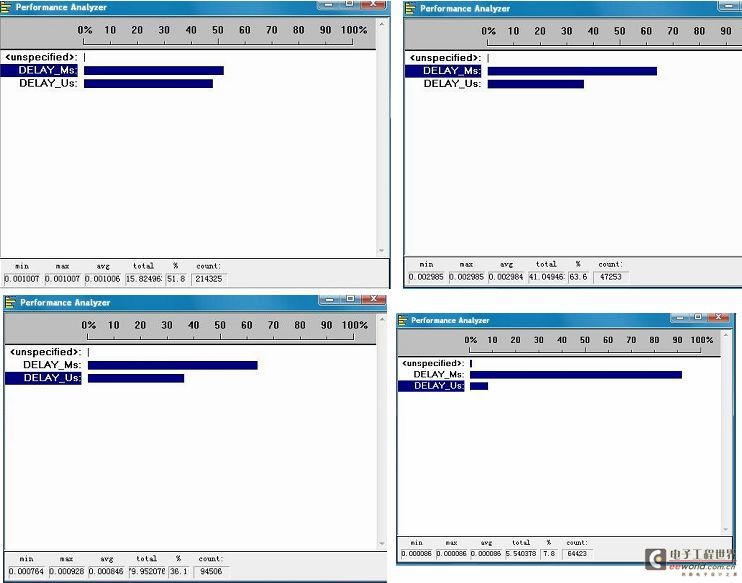
以上的代码,可以看出许多问题,软件延时不准确,大量的“while( IR_Out == 0 ) ;”代码,抗干扰能力弱,容易进入死循环。
下面介绍的这种解码方法,利用外部中断触发程序,定时器定时(但没有设置定时中断程序,即判断TF的值确定定时结束),在代码过程中,开头的一个7.93ms延时,足以滤掉不合法的红外信号。应该说效率质量更高的。
代码注释很详细,在此不在细述:
[cpp]view plaincopy
- /*------------------------------------------------------------*-
- IR_Decoder.C(v1.00)
- ------------------------------------------------------------
- 名称:遥控器红外解码,PO口接LED,显示功能码以供查看
- 编写:mhjerry
- 日期:20011.7
- 内容:按遥控器上的按键,会在PO口LED上显示
- -*------------------------------------------------------------*/
- #include"reg52.h"
- //此口为红外信号输入MCU口
- sbitIR_Out=P3^2;
- //主程序运行标志位,运行主程序时LED灭,运行中断程序时LED亮
- sbitIR_Flag=P3^1;
- //LED显示口
- #defineLED_PortP1
- //用于存放按键码值,初始化为00000000这样接受数据时可以只考虑1了
- unsignedchardat[4]={0,0,0,0};
- /*............................................................*/
- voidmain()
- {
- IR_Out=1;//此口为MCU输入口,故需要置1
- IR_Flag=1;//灭LED灯
- TMOD=0x01;//定时器0,方式1
- IT0=1;//外部中断0,下降沿触发
- EX0=1;//准许外部中断
- EA=1;//CPU准许中断
- while(1)
- {
- IR_Flag=1;//执行主程序时,LED灯灭
- }
- }
- /*------------------------------------------------------------*-
- 函数名称:Int0()
- 函数输入:无(容许中断时,外部触发)
- 函数输出:无
- 函数说明:外部中断0中断处理
- -*-------------------------------------------------
红外遥控系统单片机软件解 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)