比较简单的AVR单片机超声波测距的实例
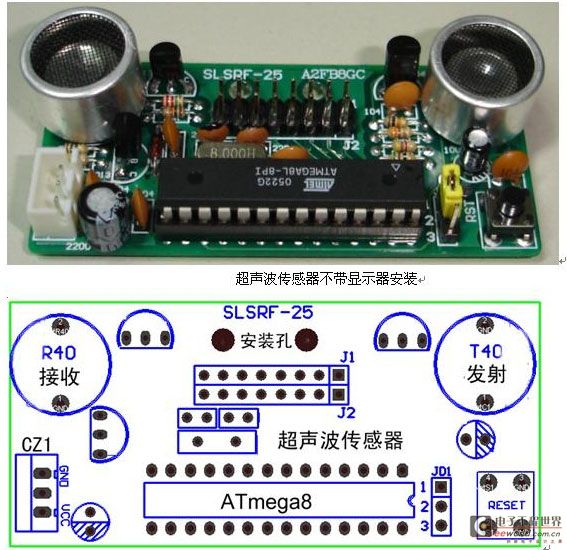
短路插针JD1-2/-3脚功能接地;JD1-1接PC5;短路块插于2,3间,使用LED数码管显示;短路块插于1,2间,使用LED发光二极管显示,或超声波传感器输出分段控制信号。超声波传感器输出分段控制信号对应J1引脚:
1、J1-1—PD0避障距离范围5~9cm
2:J1-2—PD1避障距离范围10~19cm
3:J1-3—PD2避障距离范围20~29cm
4:J1-4—PD3避障距离范围30~39cm
5:J1-5—PD4避障距离范围40~49cm
6:J1-6—PD5避障距离范围50~99cm
7:J1-7—PD6避障距离范围100~179cm
8:J1-8—PD7避障距离范围180~250cm
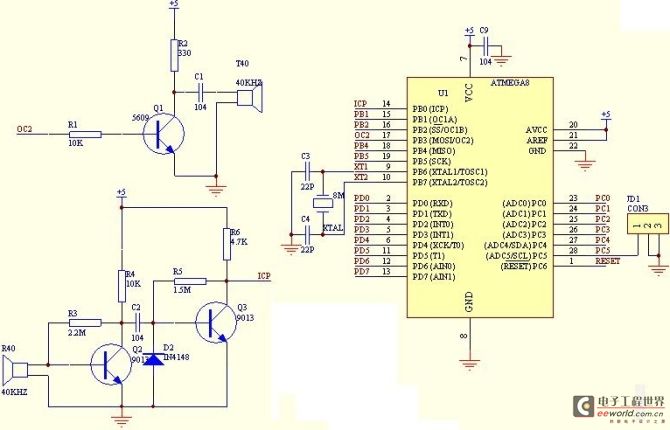
SLSRF-25电原理图
SL-SRF-25超声波测距源程序:
/*********************************************************************
Project:超声波测距
Chiptype:ATMEGA8
Clockfrequency:8.000000MHz
*********************************************************************/
#include
#include
#pragmainterrupt_handlerintt0:10//T0溢出中断
#pragmainterrupt_handlericp_timer1:6//T1捕捉中断
#pragmadata:code//设定数据区为程序存储器
constunsignedchartab1[]={0X28,0XEE,0X32,0XA2,0XE4,
0XA1,0X21,0XEA,0X20,0XA0};//七段译码字型表(lm,cm)
constunsignedchartab2[]={0X08,0XCE,0X12,0X82,0XC4,
0X81,0X01,0XCA,0X00,0X80};//七段译码字型表(m)
#pragmadata:data//设定数据区回到数据存储器
unsignedcharledbuff[]={0X08,0X28,0X28};//显示缓冲区
unsignedcharcount;
unsignedcharnewcount;
unsignedcharoldcount;
voidintt0(void)//T0中断定时程序,定时58US,即测距1CM.
{
TCNT0=0XC6;
count++;
}
voidicp_timer1(void)//ICP1捕捉中断,捕捉频率38.5~41.6
{
if(96<=ICR1<=104)
{
SREG&=0X7f;
newcount=count-13;
ICR1=0;
TCNT1=0;
TCCR1B=0X81;
}
}
voiddelay_1us(void)//1us
{
asm("nop");
}
voiddelay_us(unsignedintt)//tus
{
unsignedinti=0;
for(i=0;i
}
voiddelay_1ms(void)//1ms
{
unsignedinti;
for(i=1;i<1142;i++);
}
voiddelay_ms(unsignedchart)
{
unsignedchari=0;
for(i=0;i
delay_1ms();
}
}
voidsend40kHz(void)//发射40KHz超声波
{
count=0;
TIMSK&=0XDF;//禁止ICP1使能
OCR2=0X64;
TCCR2=0X19;
}
voidclose40kHz(void)//停止发射超声波
{
TCCR2=0X00;
}
voidhextobcd(unsignedcharm)//将count十六进制数据转换为LED七段码
{
unsignedchartemp;
temp=m%10;
ledbuff[0]=tab1[temp];//mm位
m=m/10;
temp=m%10;
ledbuff[1]=tab1[temp];//lm位
temp=m/10;
ledbuff[2]=tab2[temp];//m位
}
voiddisplay3led(void)//数码管显示
{
unsignedchari;
for(i=0;i<3;i++)
{
PORTD=ledbuff[i];
PORTC=~(1
PORTC=(1
}
voiddisplay8led(void)//8LED显示
{
if(newcount<10)
PORTD=0XFE;
elseif(newcount<20)
PORTD=0XFD;
elseif(newcount<30)
PORTD=0XFB;
elseif(newcount<40)
PORTD=0XF7;
elseif(newcount<50)
PORTD=0XEF;
elseif(newcount<100)
PORTD=0XDF;
elseif(newcount<180)
PORTD=0XBF;
else
PORTD=0X7F;
}
voidmcu_init(void)//MCU初始化
{
DDRD=0XFF;
PORTD=0XFF;
DDRC=0XDF;//PC5为输入
PORTC=0XFF;
DDRB=0XFE;
PORTB=0XF7;
TCNT2=0X00;
TCNT0=0XC6;//T0定时58US
TCCR0=0X02;//T0定时器1/8分频
TCNT1=0X00;
TCCR1A=0X00;
TCCR1B=0X81;//输入捕获噪音抑制允许,ICP1下降沿触发,系统时钟
TIMSK=0X01;//使能T0定时溢出
}
voidmain(void)
{
unsignedchari;
mcu_init();
for(;;)
{
send40kHz();
SREG|=0X80;
delay_us(50);
close40kHz();
delay_us(20);
TIMSK=0X21;
if(!(PINC&0X20))//如果插上JD1短路块,则数码管显示距离
{
if(newcount!=oldcount)
oldcount=newcount;
hextobcd(oldcount);
for(i=0;i<20;i++)
display3led();
}
else
{
PORTC=0XFF;
display8led();
delay_ms(100);
}
}
}
双龙SL-SRF-25超声波避障程序—51单片机
/***********************************************************************/
/*
广州双龙电子
WWW.SL.COM.CN
功能:
超声波避障,避障距离为10cm;前进遇障后退左转弯.
接线方法:
52板P1.0(用短线)接超声波传感器J1-1(J1插针的第一脚)
注意:
用户可以根据自已的避障距离,把52板P1.0脚连接到超声波传感器的相应脚
以下是避障距离范围情况:
1:J1-1避障距离范围5~9cm
2:J1-2避障距离范围10~19cm
3:J1-3避障距离范围20~29cm
4:J1-4避障距离范围30~39cm
5:J1-5避障距离范围40~49cm
6:J1-6避障距离范围50~99cm
7:J1-7避障距离范围100~179cm
8:J1-8避障距离范围180~250cm
Chiptype:AT89S52
Clockfrequency:24MHz
*/
/************************************************************************/
#include"reg52.h"
sbitP1_0=P1^0;//定义避障距离检测脚
voiddelay_1ms(void)//1毫秒延时程序
{
unsignedcharj=0,i=8;
do
{
while(--j);
}
while(--i);
}
voiddelay(unsignedchari)//毫秒级延时程序
{
while(i--)
delay_1ms();
}
voidforward(void)//LED4~5亮,前进
{
P0=0XE7;
P3=0x50;
}
voidleft(void)//LED1~3亮,左转
{
P0=0XF8;
P3=0x60;
}
voidback(void)//LED全亮,后退
{
P0=0;
P3=0XA0;
}
voidinit(void)//端口初始化
{
P1|=0X01;//要读取P1.0,就先写1
P0=255;//8LED全不亮
P3=0;
}
/***********************************************************************
主函数
***********************************************************************/
voidmain(void)
{
init();//系统初始化
while(1)//循环
{
if(!P1_0)//如果在避障范围,则后退,左转弯
{
back();
delay(200);//后退200毫秒
left();
delay(200);//左转90度.
}
else
{
forward();
delay(200);
}
}
}
AVR单片机超声波测 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)