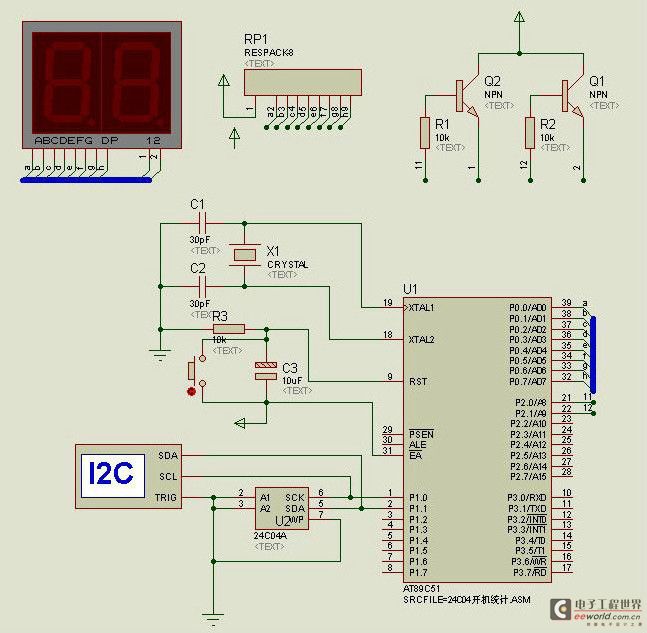
24C04扩展存储器C和汇编程序
#include
#include
#define uint unsigned int
#define uchar unsigned char
sbit sda=P1^1;
sbit scl=P1^0;
uchar temp=0;
uchar data_h,data_l;
uchar state;
const uchar tab[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};
void delayic(uint i)
{
uchar j;
while(i--)
{
for(j=0;j<120;j++);
}
}
void delaym(uchar t)
{
uchar i;
for(i=0;i
void Start_I2c()
{
sda=1;
_nop_();
scl=1;
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
sda=0;
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
scl=0;
_nop_();
_nop_();
}
void Stop_I2c()
{
sda=0;
_nop_();
scl=1;
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
sda=1;
_nop_();
_nop_();
_nop_();
_nop_();
}
void cack(void)
{
sda=0;
_nop_();
_nop_();
_nop_();
scl=1;
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
scl=0;
_nop_();
_nop_();
}
void mnack(void)
{
sda=1;
_nop_();
_nop_();
_nop_();
scl=1;
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
scl=0;
sda=0;
_nop_();
_nop_();
}
void wrbyt(uchar date)
{
uchar i,j;
j=0x80;
for(i=0;i<8;i++)
{
if((date&j)==0)
{
sda=0;
scl=1;
delaym(1);
scl=0;
}
else
{
sda=1;
scl=1;
delaym(1);
scl=0;
sda=0;
}
j=j>>1;
}
}
uchar rdbyt(void)
{
uchar a,c;
scl=0;
delaym(1);
sda=1;
delaym(1);
for(c=0;c<8;c++)
{
scl=1;
delaym(1);
a=(a<1)|sda;
scl=0;
delaym(1);
}
return a;
}
void read_data()
{
Start_I2c();
wrbyt(0xa0);
cack();
wrbyt(1);
cack();
Start_I2c();
wrbyt(0xa1);
cack();
temp=rdbyt();
mnack();
Stop_I2c();
delayic(50);
}
void write_data()
{
if(temp<=10)
{
state=temp;
state++;
Start_I2c();
wrbyt(0xa0);
cack();
wrbyt(1);
cack();
Stop_I2c();
delayic(50);
}
else
{
temp=0;
state=temp;
Start_I2c();
wrbyt(0xa0);
cack();
wrbyt(1);
cack();
wrbyt(state);
cack();
Stop_I2c();
delayic(50);
}
}
void dispaly(uchar count)
{
uchar num;
num=count;
if(num>=5)
{
P2=0x00;
delayic(400);
}
data_l=num%10;
data_h=num/10;
P2=0x01;
P0=tab[data_h];
delayic(150);
P2=0x02;
P0=tab[data_l];
delayic(150);
}
void main()
{
read_data();
write_data();
while(1)
{
dispaly(temp);
}
}
汇编程序:
;24c02的开机计数器,系统复位一次数码管加1
SDA24 EQU P1.1
SCLK24 EQU P1.0
ORG 0000H
AJMP MAIN
ORG 0030H
MAIN:
CLR P3.7 ;打开写保护
MOV DPTR,#TAB
MOV A,#00H ;读地址
LCALL RD24
CJNE A,#10,TT
TT: JNC TT1
AJMP TT2
TT1: MOV A,#00
TT2: MOV 30H,A
MOVC A,@A+DPTR
SETB P2.0 ;开数码管
MOV P0,A ;送显示
MOV A,30H
INC A
MOV B,A
MOV A,#00H
LCALL WT24
AJMP $
TAB: DB 28H,7EH,0A2H,62H,74H,61H,21H,7AH,20H,60H
RD24: PUSH ACC ;读24C02子程序。
SETB SDA24
CLR SCLK24
CALL START24
MOV A,#0A0H
CALL SHIFT8
CALL ACK
POP ACC
CALL SHIFT8
CALL ACK
CALL START24
MOV A,#0A1H
CALL SHIFT8
CALL ACK
SETB SDA24
MOV R7,#8
CLR A
SETB SDA24
RD000: RL A
SETB SCLK24
MOV C,SDA24
MOV ACC.0,C
CLR SCLK24
DJNZ R7,RD000
RET
;-------------------------------
;写入24C02程序:
WT24: PUSH ACC
SETB SDA24
CLR SCLK24
CALL START24
MOV A,#0A0H
CALL SHIFT8
CALL ACK
POP ACC
CALL SHIFT8
CALL ACK
MOV A,B
CALL SHIFT8
CALL ACK
CALL STOP
CALL DELAY2
RET
; -------------------------------
;开始条件
START24:CLR SDA24
SETB SDA24
SETB SCLK24
CLR SDA24
CLR SCLK24
RET
;停止条件
STOP: CLR SDA24
SETB SCLK24
SETB SDA24
RET
;应答信号
ACK: SETB SCLK24
CLR SCLK24
RET
;读、写数据
SHIFT8: MOV R7,#8
SH01: RLC A
MOV SDA24,C
SETB SCLK24
CLR SCLK24
DJNZ R7,SH01
RET
DELAY2:
NOP
NOP
NOP
NOP
RET
END
24C04扩展存储器汇编程 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)