自动包装机控制系统的设计
一、引言
随着计算机电力电子技术的发展,各个国家机电一体化产品层出不穷。机床、汽车、家用电器、包装机械、纺织机械、印刷机械等许多门类产品每年都有新的进展。机电一体化技术已越来越受到各方面的关注,它在改善提高工作效率、人民生活、节约能源、增强企业竞争力等方面起着极大的作用。
在包装行业中,绝大多数包装机采用PLC来实现对横封电机的控制,该方案采用模拟量进行速度跟随主轴运动,使用这种控制系统包装的产品一致性不是特别理想,更重要的是包装速度很难提高到200袋/分钟以上的包装速度,这不符合企业提高工作效率的迫切要求。为此,我们基于MPC05运动控制器设计了一套包装机控制系统,该套系统具备包装产品质量高和包装效率高的两个重要特点,并且还具有色标跟踪功能。
二、工作原理
如图一所示为一包装机的示意图。8纵封辊筒由异步电机带动即主轴电机,9热封辊筒、10冷封辊筒、12切刀由一个伺服电机带动即从轴电机。从轴电机要跟随主轴做跟随运动。其工作原理是MPC05运动控制器接收主轴编码器信号,根据主轴编码器的脉冲数按照一定的运动规律驱动伺服电机跟随主轴作相应的跟随运动,该伺服电机通过链传动同时带动热封辊筒、冷封辊筒、切刀运动。
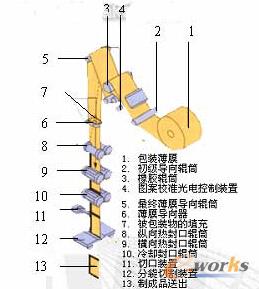
图1 包装机的示意图
热封辊筒轴以1:4的减速比装有一个编码器,用作闭环控制。该编码器的值与伺服电机理论上应该走的距离进行比较进行PID调节,使从轴伺服电机跟随主轴电机做全闭环的位置跟随。
三、控制器的设计
控制系统的控制器采用FPGA+DSP的方案,图二为控制器的结构图,FLASH用于存储DSP程序,多余的空间可以用来存储配置程序或加工程序以及系统工艺参数和现场数据。NAND FLASH大规模板上存储,用于存储配置数据、加工数据等。控制器的核心是DSP和FPGA,DSP实现CPU功能,FPGA实现控制功能和IO功能。

图2 控制器的结构图
该控制器的加工文件可以通过RS232下载,或通过U盘拷贝,接收主轴编码器反馈的信号以及从轴编码器反馈信号,输出的脉冲方向信号接伺服电机驱动器,I/O口接停机信号或开机信号等。两个串口,其中,串口A为PC机接口,采用松下伺服的数据传输协议通讯。串口B为人机界面接口,采用标准的 Modbus协议通讯。
四、控制程序的设计
由于纵封辊筒和横封辊筒周长相等都为300mm,横封辊筒有4根筋,所以横封辊筒每转一转可以包装4袋产品。如果包装的袋长为300/4=75mm,则属于同步跟随,即横封纵封辊筒包装一袋所走的距离相等。如果包装袋长大于75mm,则横封辊筒在非啮合区应该做减速运动,然后再升速到与主轴同步,准备下一次啮合,如果袋长小于75mm,则横封辊筒在非啮合区应该做升速运动,然后再降速到与主轴同步,准备下一次啮合。在啮合区需要横封和纵封辊筒同步运动,否则当横封辊筒速度高于纵封辊筒的速度时,将会出现扯膜现象;当横封辊筒速度低于纵封辊筒的速度时,将会出现堆膜的现象,这些现象将会影响加工产品的质量,严重的情况还可能将包装膜扯断。
如图三所示为从轴电机运动的模型。
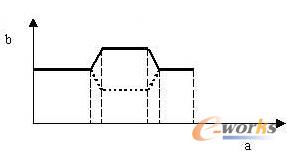
图3 从轴电机运动的模型
设A代表主轴,B代表从轴。首先计算出A、B的周期长度(周期长度是指包装一个袋子所需的脉冲数)以及同步系数,然后将A的周期分成如图三横坐标所示的5 段,再根据A的5段的长度和同步系数,计算出异步系数,最后计算出B对应的5段的长度,即同步段,升(降)速段、异步段,降(升)速段和同步段,其中在第一个同步段横封辊筒两齿啮合,在中间的升降速段为适合不同的袋长要求实现变袋长,最后的一段很短的同步段是为了使进入下一个啮合的同步段更为平稳(这里长度的单位均为脉冲数)。
对从轴的位置控制采用比较成熟的经典的PID控制。PID控制具有原理简单、使用方便、适应性好等优点。我们这里采用的是增量式PID控制算法。增量式PID控制有很多优点:
(1) 由于计算机输出增量,所以误动作时影响小,必要时可采用逻辑判断的方法去掉;
(2) 算式中不需要累加,控制增量的确定,仅与最近k次的采样值有关,所以较容易通过加权处理而获得比较好的控制效果。
PID控制器是一种线性调节器,它把设定值(各段从轴应该发的脉冲数)与实际输出值(从轴编码器值)相减,得到控制偏差 , 的比例系数(P)、积分系数(I)和微分系数(D)通过线性组合构成控制变量 (伺服电机的脉冲频率)。控制变量的增量 的计算公式为:

式中,T为采样周期,K为比例系数,加大比例系数K可以减小稳态误差,但当K过大时,会使动态质量变差,导致系统不稳定。TI为积分常数,TI越大积分作用越弱,积分环节的加入,能消除静态误差,使系
包装机控制系 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)