RS485硬件电路设计中需注意的问题
多芯电缆。RS-485信号线宜选用截面积0.75 mm2以上的双绞线而不是平直线,并且选用线性电源TL750L05比选用开关电源更合适。TL750L05必须有输出电容,若没有输出电容,则其输出端的电压为锯齿波形状,锯齿波的上升沿随输入电压变化而变化,加输出电容后,可以抑制该现象。
3、软件的编程
SN75LBC184在接收方式时,A、B为输入,R为输出;在发送方式时,D为输入,A、B为输出。当传送方向改变一次后,如果输入未变化,则此时输出为随机状态,直至输入状态变化一次,输出状态才确定。显然,在由发送方式转入接收方式后,如果A、B状态变化前,R为低电平,在第一个数据起始位时,R仍为低电平,CPU认为此时无起始位,直到出现第一个下降沿,CPU才开始接收第一个数据,这将导致接收错误。由接收方式转入发送方式后,D变化前,若A与B之间为低电压,发送第一个数据起始位时,A与B之间仍为低电压,A、B引脚无起始位,同样会导致发送错误。克服这种后果的方案是:主机连续发送两个同步字,同步字要包含多次边沿变化(如55H ,0AAH),并发送两次(第一次可能接收错误而忽略) ,接收端收到同步字后,就可以传送数据了,从而保证正确通信。
为了更可靠地工作,在RS485总线状态切换时需要适当延时,再进行数据的收发。具体的做法是在数据发送状态下,先将控制端置“1”,延时0.5 ms左右的时间,再发送有效的数据,数据发送结束后,再延时0.5 ms,将控制端置“0”。这样的处理会使总线在状态切换时,有一个稳定的工作过程。数据通信程序基本流程图如图2所示。
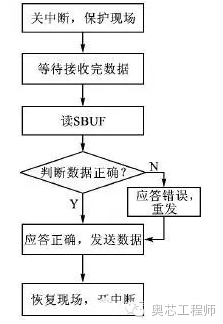
图2 数据通信程序基本流程图
单片机通信节点的程序基本上可以分为6个主要部分,分别为预定义部分、初始化部分、主程序部分、设备状态检测部分、帧接收部分和帧发送部分。预定义部分主要定义了通信中使用的握手信号,用于保存设备信息的缓冲区和保存本节点设备号的变量。设备状态检测部分应能在程序初始化后,当硬件发生故障时,作出相应的反应。主程序部分应能接收命令帧,并根据命令的内容作出相应的回应。为缩短篇幅,这里仅给出主程序部分的代码。如下所示:
/* 主程序流程*/
while(1) { //主循环
if(recv_cmd(&type)==0) //发生帧错误或帧地址与本机
//地址不符,丢弃当前帧后返回
continue;
switch(type) {
case __ACTIVE_: //主机询问从机是否存在
send_data(__OK_, 0,dbuf);//发送应答信息
break;
case __GETDATA_:
len = strlen(dbuf);
send_data(__STATUS_, len,dbuf);//发送状态信息
break;
default:
break; //命令类型错误,丢弃当前帧后返回
}
}
4、结论
RS-485由于使用了差分电平传输信号,传输距离比RS-232更长,最多可以达到3000 m,因此很适合工业环境下的应用。但与CAN总线等更为先进的现场工业总线相比,其处理错误的能力还稍显逊色,所以在软件部分还需要进行特别的设计,以避免数据错误等情况发生。另外,系统的数据冗余量较大,对于速度要求高的应用场所不适宜用RS-485总线。虽然RS-485总线存在一些缺点,但由于它的线路设计简单、价格低廉、控制方便,只要处理好细节,在某些工程应用中仍然能发挥良好的作用。总之,解决可靠性的关键在于工程开始施工前就要全盘考虑可采取的措施,这样才能从根本上解决问题,而不要等到工程后期再去亡羊补牢。
RS485硬件电 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)