五轴联动开放化数控系统的设计
从MIT开发出第一台三轴铣床数控系统判现在的四1多年中,数控系统的设计方法经历了巨大的变化。特别是近I一年来,随着计算机技术的迅猛发展,数控系统从整体结构到详细设计,从软件设计到硬件设计,都与早期的数控系统有了很大不同。一早期的数控系统出十效率的考虑,许多功能采用硬件电路实现,专用性很强,可维护性、可扩展性比较差二另一方而,通用计算机的运算速度随时间以指数规律不断提高,现在一台微机的运算能力已经达到或超过了早期的小型机,而且,通用型微机应用广泛,有完善和开放的标准,有众多外IIII硬件设备和丰富的软件资源的支持。借助微机进行数控系统的开发可以达到事半功倍的效果,因此成为目前数控领域的国际趋势。
五轴联动数控系统联动轴数比较多,同时义涉及到两个回转运动,插补算法复余,而且其各组成部分,如伺服驱动单儿、位置反馈单元、误差补偿、电气控制、机床机械结构等在不同的应用场合有不同的特点,在系统整体设计时对此应有充分的考虑。目前,多数数控系统不能满足这种多样性的需要,对不同的应用场合,就得选用不同型号的数控系统,这势必增加开发与维护费用。研究开放式数控系统及其功能部件,就可以根据用户需要,比较容易地对整个数控系统进行重新组合,以提高系统的可移植性、可伸缩性、可维护性和兼容性。
2 数控系统硬件的开放化设计
2.1 硬件设计的一般原则
传统数控系统的硬件设计分为两个流派:采用专用芯片的大板结构与总线式体系结构。人板结构对用户而言是一个封闭的系统,功能的扩展与系统维护都受到限制。总线式结构有一定的灵活性,但由于这种总线由生产)一自己确定,缺乏共同的行业标准,不同)一商的产品之间不具备互换性,所以,这种设计方法已不适应现代制造业的需要。另一方而,随着计算机技术的发展,微机的速度与}一儿年前相比是天壤之别。在这种形势一「的软硬件设计中,人们关注的重点出现了由效率向互换性、可维护性转移。受其影响,在数控系统的设计进程中,由大板结构或专用总线向标准总线、可重组的单儿模块发展成为国际趋势。
硬件设计的开放化主要体现在总线标准上。开放化的数控系统是由多种模块构成的,模块通过标准的总线连成一个整体。总线的选择应当满足三个要求:庄技术上有一定的先进性,能够满足数控系统各种功能模块对信息交互的需要。线标准完全开放,且在国际上得到广泛认可应用,而不是由某个厂商自己定义使用的某种特殊总线标准。睡其有高度的可靠性。
选择了合适的总线标准后,才能进行各功能模块的设计。在数控系统中,主要的功能模块有;运动轴位置控制模块、电气控制模块、机床操作而板及数控而板接口模块、通讯模块、显示模块等。功能模块应当能够重新配置,以免不同模块I/O端口地址及中断类型发生冲突口
2.2 五轴联动数控系统的硬件设计
在五轴联动数控系统开发过程中,我们选择工控机作为设计的基础。工控机木身符合多种工业标准,是一种开放化的计算机系统,与常用的微机有良好的兼容性,有大量的软硬件的支持。目前工控机底板插槽总线类型主要有两种:ISA总线工业标准总线)和PCT总线(外围设备接口)。ISA总线的数据传输速率比较低,但已能满足数控系统的需要。同时,高总线速率会对各功能模块的硬件提出更高的要求。因此,我们选用TSA总线作为所有模块设计的基础。
由十五轴联动插补算法复杂,有大量浮点运算,对实时性要求又较高,我们选用Pentium166 CPU完成插补运算。另外,系统中各个坐标轴还需具备位置控制功能,位置控制实时性很强,且控制轴数比较多,该任务与插补共用一个CPU会导致数控系统主机负担太重,实时性不易保证,而且故障风险过于集中,较好做法是何根轴采用一个独立的CPU进行控制,采用层次式体系结构构成系统。根据位置控制CPU与主机交互信息方法的不同,分为两种结构见图1。第一种结构把位置控制板直接插到土控机底板的ISA插槽中,在这种情况下,主机与多个位控板之间直接进行信息传输,由于位控板CPU速度低,数据通讯阶段会浪费主机CPU资源,控制轴数越多,主机CPU的效率就越低。此外,主机还需采取措施来保证多个位控板在时间上的准确同步。因此,我们选择了第二种结构。第二种结构采用单独的通讯机完成主机与位控板之间的信息传递。通讯机一方而通过双口存储器与主机之间进行信息交换,另一方而通过自建的局部总线与位控板进行信息交换。双口存储器容量为2kb,‘己同时也起数据缓冲器的作用。这种方案大人减少了主机用于信息交换的CPU时间。
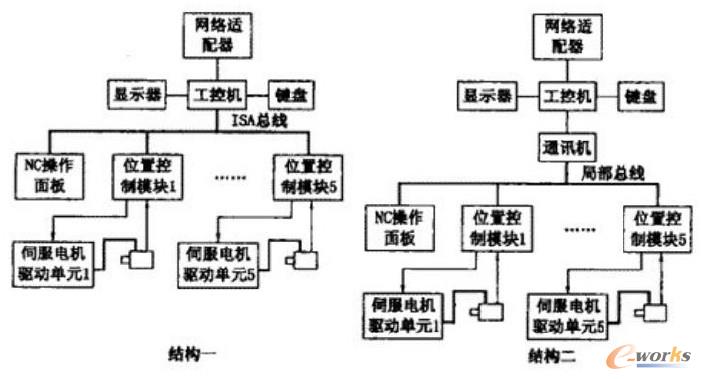

图1分布式多
五轴联动数控系 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)