双焊枪自动焊接机数控系统设计

1 自动焊接机硬件构成
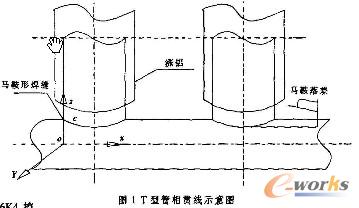
要完成对T型管相贯线的焊接,除了要求焊枪具有平动功能,即焊枪的端瞄位置在允许的误差范围内准确跟踪相贯线焊缝外,还要求焊枪具有摆动的功能,保证焊枪轴线在焊接过程中始终与相贯线焊缝的切线方向保持一定角度。同时,在实际散热器T型管相贯线的焊接中,还存在以下问题:
(1)由于要进行多T型管相贯线的连续焊接,管与管之间的空间有限,单焊枪难以对T型管相贯线1次完全施焊,而采用分段分时焊接方式会由于温度分布不均产生较大的受热变形,严重影响工件的质量。
(2)由于在焊接过程中又存在铝翼等障碍,为避免发生焊枪头转动时与铝翼产生干涉,对焊枪枪头在垂直平面(XOZ平面)的抬头度也提出了要求。
针对这些问题,在该焊接数控系统的设计上采取了以下措施:
(1)采用双焊枪对焊的方式。控制两把焊枪同时相向运动,对相贯线进行1次性的完全焊接,每把焊枪只需完成半个T型管相贯线的焊接。
(2)使用6K4多轴运动控制器的1个电机驱动接口的输出脉冲控制两把焊枪同步运动。实时调整两把焊枪相对焊接工作区域的倾斜角度,以保证良好的焊接质量。
(3)控制焊枪运动的步进电机动力轴输出端通过固定孔为圆弧状且60°可调的圆盘法兰和焊枪固定在一起,从而使焊枪在Z轴方向上抬头度在60°范围内可调,方便用户进行调节,在焊接过程中避开铝翼障碍。
(4)焊接前,对焊枪头进行调整,使焊丝端瞄位置(即焊丝轴线的延长线与工件表面的交点,以下简称焊枪头部)其在焊接过程中始终处在焊枪的回转中心线上。消除在焊接运动过程中因焊枪头部不在焊枪的回转中心线上所造成的焊接质量问题。
但是在焊枪长度固定且要进行双焊枪同时焊接的情况下,一般需要五轴控制器才能实现。而在本焊接机的设计中,设计了一种新型的控制结构:采用了6K4四轴运动控制器,其中三轴实现X、Y、Z 3个方向上的插补,完成焊接曲线的拟合。同时为实现焊枪在焊接过程中实时摆动,利用6K4控制器的1个输出轴来同时控制两把焊枪(焊枪控制采用步进驱动系统),在保证经济性的同时,又保证了双焊枪摆动的同步性,提高了焊接精度。
该数控系统采用2级控制,上位机采用工业控制计算机(IPC),下位机采用6K4多轴运动控制器和MCS-51单片机系统并行运行的模式。整个焊接数控系统由5个轴组成。机床坐标系的建立如图1所示,分别是控制工件输送台移动的X轴,控制焊枪进给运动的Y轴,控制焊枪垂直移动的Z轴,以及控制双焊枪摆动的C轴。其中C轴细分为C1轴和C2轴,用来分别控制2个焊枪的摆动。其硬件结构原理图如图2所示。
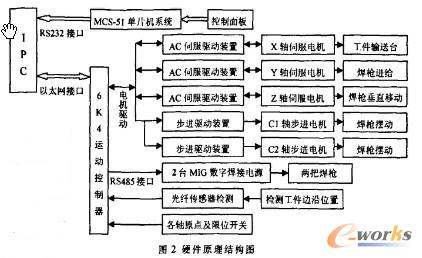
工控机选用的是华北工控的型号为RWS-856A的工控一体化机。RWS-856A是专门为工业自动化应用环境设计的,配置有高性能的控制运算平台、低功耗的高性能工业主板、15英寸高亮带电阻式触摸面板的液晶显示屏,主要用来实现系统的管理功能及人机交互功能,如可实现图形显示、焊接参数设置、在线调试、数字焊机参数显示等。
控制器选用parker公司生产的6K4四轴运动控制器。6k4是一个结构独立的运动控制器,它能够控制1~4个轴的步进电机和伺服器的任意组合。另外,它还提供了8路限位开关(每轴2路)输入、4路原点开关(每轴1路)输入、4路通用数字量输出接口、8路通用数字量输入接口,RS232、RS485和以太网接口RJ45 3种通讯接口以及容量达300 KB的程序存储器[4]。在本研究中,使用6K4控制器的1个电机驱动端口同时驱动2套步进驱动系统。2个步进电机细分驱动器脉冲输入端CP、方向信号输入端CW分别与控制器的DRIVES端口的脉冲信号端STEP和方向信号端DIRECTION相连,在保证系统经济性的同时,使2个步进电机在低速情况下具有较高的运动同步性。
动力系统选用交流伺服系统(X、Y、Z)和步进驱动系统(C1和C2)。交流伺服系统是由交流伺服放大器、交流伺服电机和光电编码器组成的闭环控制系统,控制精度较高。因此,进行T型管相贯线轨迹拟合的
双焊枪自动焊接机数控系 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)