模糊PID控制器在伺服系统中的应用
时间:12-12
来源:互联网
点击:
宽度相等。
4 仿真结果
为了验证PID模糊控制器的控制效果,用Matlab/Simulink软件进行仿真,根据系统的数学模型,仿真框图如图3所示。

图3 车载天线伺服系统仿真框图
运行仿真程序,得到如图5所示的仿真结果。从图中可以知道,在阶跃响应下,与传统PID仿真图4相比,该系统的上升时间和调节时间大大缩小,超调量明显减小,大大提高了系统的动态性能。

图4传统PID动态响应曲线
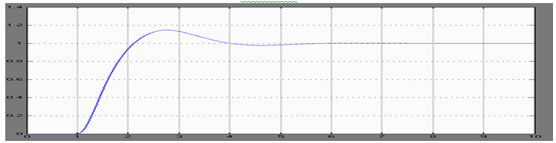
图5模糊PID动态响应曲线
5 结束语
本论文将模糊控制与SIMULINK相结合,对车载伺服系统设计了一个比较合理的模糊PID控制器并且进行MATLAB仿真。由于车载天线处于一个实时变化的环境,导致系统参数可能会根据环境变化。传统的固定控制参数的控制策略没有办法满足这样的需求,而模糊自适应控制却恰好弥补这一缺陷。同时模糊自适应控制还很好地解决了伺服系统本身自带的由于惯量引起的误差。软硬件结合真正满足了系统的快,准,稳。为军事上各种雷达天线的设计提供了参考。
模糊PID控制器伺服系 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)