总线编码器与S7-300在桥式起重机双车抬吊上的应用
我单位为津巴布韦卡里巴南岸水电站地下厂房自主设计制造的两台250t/50t/10t单小车桥式起重机(以下简称桥机),主要用于地下厂房内水轮发电机定转子及其它设备的安装和检修,水轮发电机组起吊最重部件为转子带起吊轴,转子装配(含起吊轴)重量约403.5t。设计制造的两台桥机机械结构与电气控制系统一模一样。两台桥机分开操作时可以单独司机室操作也可以单独遥控器操作,并车操作时采用MPI网络通讯,一台桥机的司机室或者遥控器可以同时操作两台桥机的各个每个机构。两台桥机进行同步抬吊水轮机定、转子时,两桥机起升及大小车均需保持同步,考虑到布线的方便及系统的稳定性,电气控制系统采用倍加福PROFIBUS-DP总线编码器与S7-300PLC进行DP总线通讯,以获取两台桥机主起升机构与小车机构的实时位置,从而保证其控制的精度及系统运行的稳定性。
2、倍加福PROFIBUS-DP总线编码器
德国倍加福公司(P+F)是全球自动化行业中久负盛名的专业传感器龙头公司,其生产PROFIBUS-DP总线编码器基于现代的快速的取样技术。编码器的绝对值符合PROFIBUS协议,操作基于Class1和Class2。对于基于Class1的编码器,位置值和诊断数据,Byte1...16可用。另外,编码器的方向可以选择,CW(递增)(顺时针旋转,码值递增),或者CW(递减)(顺时针旋转,码值递减)。对于基于Class2的编码器,所有符合Class1的附加功能全部可用。这些包括了单圈和总精度的比例功能,预设功能,另外支持延伸的诊断报告功能。除此之外,旋转编码器可以提供以下扩展功能,例如速度转换,扩展比例功能,可编程的限位开关和调试模式。可拆卸的连接后盖内装有一个滑动开关用于设定终端电阻和旋转开关用于设定地址。该系列PROFIBUS-DP总线编码器主要有以下特点:
①工作电压范围宽达DC10V-30V;②消耗功率最大2.5W;③总线接口为光电耦合绝缘电源;④波特率范围宽达19.2KMBaud-12MBaud;⑤输出码为二进制码、分辨率高达65536步/圈;⑥编码器可识别圈数宽达16384圈;⑦编码器精度高达±2LSB/16位、±1LSB/13位、±0.5LSB/12位;⑧防护等级高达IP66、工作温度范围宽达-40~85℃;⑨具有灵活的预置功能与置零功能;⑩带有选择计数方向功能。
基于FuchsPROFIBUS-DP总线编码器以上种种优良特点,所以在位置检测功能中,选用带有DP接口、型号为PVM58N-011AGR0BN-1213的绝对值编码器来检测和测量两台桥机主起升机构与小车机构的实时位置,编码器安装位置如图1所示。


图1起升编码器与小车编码器安装位置
3、DP总线编码器与S7-300的系统组态
由于本桥机PLC系统采用了西门子S7-300,采用西门子编程软件STEP7V5.5,在DP总线编码器硬件组态前首先必须安装P+F编码器PVM58的GSD文件。安装编码器GSD文件时,在S7-300编程软件的右边硬件目录PROFIBUSDP→AdditionalFieldDevices→Encoders→PEPPERL+FUCHS→P+FEncoder,从而将P+F编码器接入了DP网络,以此完成了桥机PROFIBUS-DP网络的硬件组态,软件选择P+Fversion2.2multiturn,见下图2所示,其中DP总线编码器软件设置见下图3所示:
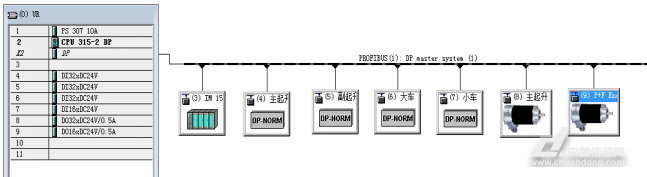
图2S7-300PLC与DP总线编码器的网络硬件组态
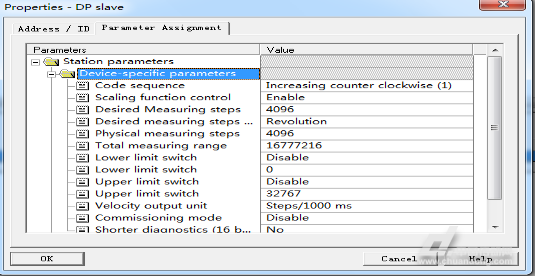
图3DP总线编码器软件设置
4、同步抬吊的依据与原理
两台桥机主起升机构在并车抬吊水轮发电机转子或定子的时候,必须保证两主起升机构在垂直方向的高度差以及水平方面的水平差值(水平方向两主起升机构吊钩中心线同心)在一定的范围内,如果超出了这个范围,则对安装水轮机定子和转子势必造成一定的影响。这就要求我们电气控制系统中必须时时刻刻了解两台桥机的主起升机构与小车机构的实时位置,以便操作者进行自动或手动调节垂直高度差和水平差值。在这里主要列出垂直方向主起升机构同步抬吊的原理,水平方向小车机构与主起升机构自动同步抬吊原理一样。为了方便描述,将A桥机主起升机构检测到的高度值简称为1#,将B桥机主起升机构检测到的值简称为2#,利用A车采用遥控器进行并车同步抬吊,两台桥机电气系统采用MPI网络通讯,利用网络将两台桥机的数据实时的相互传输,包括两台桥机的位置信号、桥机的运行状态等等,这里主要以自动同步抬吊说明。
1、当两台桥机开始并车同步抬吊时,将A车遥控器-SWBAB拨至主车位置,将B车遥控器-SWBAB拨至副车位置,此时如果将A车遥控器-SWCAB拨至并车位置,将B车遥控器-SWCAB拨至并车位置,这里有三种情况如下所所示:
①如果0≤1#-2#<1cm或0≤2#-1#<1cm,则两台桥机主起升机构可以同步起升或下降;
②如果1#-2#≥1cm,如果执行上升抬吊命令,则A车自动减速,B车自动加速,且各挡速度可调;
③如果2
总线编码器S7-300桥式起重机双车抬 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)