西门子自动化控制系统在汽车生产线中的应用
实时的监控通讯状态,如有问题可以及时的发现处理。另外由于每个子系统既独立控制,又相互联系。所有选用DP-Coupler来进行不同CPU之间的数据交换。对有本地启停设备的地方选择PP17面板,这种方案比使用触摸屏控制更加可靠,而且也更容易适应现场恶劣的环境。对于是否选择变频器MASTERDRIVE,主要是根据工艺的要求选择的电机,如果电机是非变频的可以选择马达启动器来启动电机。而对于现场一些特殊点的不能通过控制柜中的模板采集的,可选择ET200eco来进行现场采集而无需放在控制柜里,滑撬系统使用MOBYE进行车身的识别。图5即为总装系统的主监控画面,从图中各工位的颜色可以清楚的看出各个工位以及整个系统的工作情况。


图2 总装系统主监控画面
对采集数据和监控生产的上位机,采用了服务器-客户机的模式,如图2所示,共有2台服务器和5台客户机,2台服务器互为冗余,选用的 HPProLiant DL服务器,安装了Windows2003 server standard版操作系统,WinCC安装的是6.0 SP4版本。5台客户机选用的是工业控制计算机,安装了Windows2000英文版操作系统,WinCC版本和服务器一样。选择这种方案主要是基于三方面的考虑。①可靠性高:互为冗余的服务器进行数据的定时同步,保证了数据的一致性和可靠性;②开发周期短:这种模式只需开发一个服务器的程序即可,两台服务器互为备份程序完全一样,而客户端的PC 无需编写程序,只需通过工业以太网来访问服务器的程序即可,开发难度小而且周期短;③成本低:由于本项目通讯点多,采用其它方式购买授权的费用相对较高,这种模式客户机端只需128点的授权费用,这样总体费用大大降低。
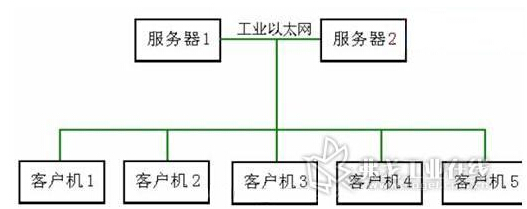
图3 上位监控系统配置图
四、控制系统完成的功能
虽然本项目庞大,通讯点很多,但是各个子系统设备很大部分是相同,也具有一样的控制要求,因此我们将整个项目按照设备划分成的不同的功能组,这样可以增大一次开发的利用率,避免了重复开发,节省时间和成本。
1.升降机的控制
升降机在高位时,电动锁紧器锁紧到位,升降机上滚床无撬体,上层滚床有撬体等待,撬体经确认与EMS上的电动小车所带车体相一致,上层滚床高速把撬体送到升降机的滚床上,经变速开关变为低速,行走至占位开关停止。电动定位器关闭到位,电动锁紧器松开到位,收到EMS空中自行电动小车允许接车信号,升降机低速升到接车位,待收到EMS空中自行电动小车允许升降机下降信号后,升降机高速下降至变速开关变为低速,低速下降到到位开关停止。电动定位器打开到位,待条件允许,升降机上滚床高速把撬体送到板式链的滚床。升降机高速上升至变速开关变为低速,低速上升到到位开关停止,执行完一次循环。
2.举升台的控制
举升台在高位,下层滚床无撬体占位,上滚床高速把撬体送到下层滚床,经变速开关变为低速,行走至占位开关停止;举升台在高位,下层滚床占位停止,电动定位器关闭到位,车体检测开关检测撬体上无车体,发出允许涂装送车信号,当车体检测开关检测撬体上有车体,收到涂装送车完毕信号,前面允许送车,即举升台在低位,停止器再关闭到位,举升台在下降到位。撬体被链式移行机送到停止器,占位开关同时占位,举升台把撬体举升高位,同时举升台举升到高位,下层滚床等待接撬体,执行完一次循环。
3.总装门线升降机、停止器、推车机的控制

图4 升降机、停止器和推车机的控制
如图4所示,停止器ST01占位,停止器ST02没占位,1#升降机在高位,停止器ST02占位与ST01占位之间没有移动的吊具,停止器ST01打开到位,推车机T01由慢-快-慢把吊具推至ST02占位,停止器ST02占位延时1秒,推车机T01由慢-快-慢退回到位,1# 升降机由慢-快-慢下降到位,等装完车门,经工位工人确认后,1#升降机由慢-快-慢上升到位,停止器ST02前面允许进车,停止器ST01与ST02同时打开到位,推车机T01由慢-快-慢把吊具从ST02推出,把吊具从ST01推至ST02占位,停止器ST02占位延时1秒,推车机T01由慢-快-慢退回到位,1#升降机下降,执行完一次循环。应注意的是:升降机不在上升到位,停止器ST01/ST02必须在关闭到位,推车机必须在后退到位,否则立即停线。
升降机的自动控制是项目中的难点,主要是因为升降机的自动控制如果故障就有可能将设备以及车体损坏,对一次调试成功的要求很高。升降机虽然有硬件保护措施,需要特定条件,比如升降机只有在失电后,抱闸将会抱死,因此对于升降机控制程序的编写需要反复修改,模拟试验,才能保证调试中的万无一失,不会出安全事故。
五、总结与评价
该项目于2006年4月份进厂调试,7月份调试结束。通过
西门子自动化控制系统汽车生产 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)