profibus的全数字智能化交流伺服控制系统
控制器)之间进行快速的数据交换。对传动装置的存取总是按照主——从方式进行的,传动装置总是从站,且每个从站本身都有明确的地址。profibus周期性传输的报文结构如图3所示。

图3 profibus-dp报文结构
4.4 profibus-dp的可用数据
对于传动装置可用数据区被划分成2个数据区,它们以各自的报文进行数据传送:
(1) 过程数据区(pzd)
控制字和设定值或状态字和实际值;
(2) 参数区(pkw)
用于读写参数,读出故障信息等。pkw和pzd共有五种结构形式即:ppo1、ppo2、ppo3、ppo4、ppo5,其传输的字节长度及结构形式各不相同。根据自动化网络中传动装置的任务不同,在plc和变频器通讯方式配置时要对ppo进行选择。在结晶器调宽交流伺服控制系统中采用了 ppo5型通讯报文,它的报文结构如图4所示。图4中符号的意义如下:
pkw:参数标识符;
pzd:过程数据;
pke:参数标识符;
ind:索引;
pwe:参数值;
stw:控制字;
zsw:状态字;
hsw:主设定值;
hiw:主实际值。
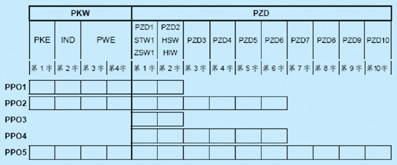
图4 ppo的报文结构
5 基于profibus的交流伺服控制系统硬件组成
5.1 plc系统
结晶器调宽plc系统作为连铸机l1系统的一个子系统,其系统设计本着可靠、先进、开放的原则,综合考虑系统的性能价格比,根据工艺方案和机械设备条件,系统结构尽可能统一,同时应与其它l1级子系统保持一致。连铸l1级plc系统选用的是siemens s7-400系列plc。根据调宽工艺性能要求,plc系统cpu 选择s7-414-3,通过cp443通讯模块与l1级工业以太网通讯,也可以通过profibus-dp接口与mc运动控制器和tp270通讯。
5.2 人机界面
根据工艺特点及现场环境,结晶器调宽人机界面选择tp270操作面板。tp270属于simatic hmi(人机界面)产品系列中文本图形触模式操作面板,在性能上有以下特点:
(1) 简单快速配置,配置数据是可以恢复的;
(2) 可用标准windows工具进行配置;
(3) 使用软键、功能键或触模控制,简化了操作,也保障了操作的安全性,易于使用;
(4) 和西门子plc完美结合,使整个系统在硬件和软件均达最优化,尤其是通讯支持profibus-dp总线协议。
5.3 mc控制器
结晶器调宽伺服控制器选用的是西门子公司masterdrives mc运动控制器,该控制器是应用于高动态响应循环机械控制的控制器,是完全智能化的控制系统。mc控制器有以下特点:
(1) 高动态响应,高过载能力
mc驱动器使用了32位dsp数字控制技术,dsp器件内部具有功能强大的硬件计算电路和特殊的总线结构,具有强大的数字信号处理功能;mc运动控制驱动器同时具有极高的过载因数,250ms内300%的过载能力。
(2) 通用性强
它能够控制任何型号的电机,具有的模块化、插入式可选编码器功能模板可以完成所有的驱动任务,有支持脉冲编码器(ttl/htl)的sbp 板,支持旋转变压器的sbr2板,支持多圈编码器(eqn,eqi, endat/ssi或sin/cos)编码器的sbm2板,都可以非常容易地与系统相连接。
(3) 强大的通讯能力
mc运动控制驱动器具有支持各种现场总线的可选模板,这些接口模板的设置,显著地增强了伺服单元与其它控制设备间的互联能力。mc运动控制驱动器的各种通讯模板中有支持profibus总线的cbp2板,profibus-dp是当今世界上最为成功和流行的现场总线标准,在 profibus cbp2功能模板上实现同级模块之间相互通讯,尤其在西门子产品系统集成中,更显示其优点。
6 交流伺服控制系统硬件配置
在交流伺服控制系统中,plc硬件组态、编程使用step7 v5.3,step 7是用于simatic可编程逻辑控制器组态和编程的标准软件包;系统操作界面tp270使用protool进行组态及编程,protool是用于可视化过程的使用简单、高性能的可视化软件,可在 windows95/98,2000下运行。
6.1 组态plc主站系统
(1) 在plc项目ccm2下新建项目plc-3(nwa-ccm1),点击右键,在弹出的菜单中选择“insert new object”下“simatic 400 station”,插入s7-400站;
profibus全数字交流伺服控制系 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)