无刷直流电机控制系统的设计方案
$无刷直流电机(Brushless DC Motor,以下简称BLDCM)是随着电力电子技术及新型永磁材料的发展而迅速成熟起来的一种新型电机。以其启动转矩大、调速性能好、效率高、过载能力强、性能稳定、控制结构简单等优点,同时还保留了普通直流电机优良的机械特性,广泛应用于伺服控制、数控机床、机器人等领域。
随着BLDCM应用领域的不断扩大,对控制系统设计提出了更高的要求。为此,建立BLDCM控制系统的可视化仿真模型,可以有效的减少控制系统的设计时间,同时充分利用Simulink仿真的优越性,加入不同的扰动以及变化的参数,以便考察系统在不同控制条件下的动、静态特性。在分析了BLDCM数学模型的基础上,借助MATLAB的Simulink工具,建立了$BLDCM控制系统的仿真模型,并利用该模型,进行了控制系统的仿真试验,结果表明,通过该仿真模型验证了数学模型的有效性及控制系统的合理性。
2.无数直流电机的总体设计
BLDCM由定子三相绕组、永磁转子、逆变器、转子磁极位置检测器等组成,其转子采用瓦形磁钢,进行特殊的磁路设计,可获得梯形波的气隙磁场,定子绕组采用集中整距绕组,由逆变器提供给方波电流。BLDCM梯形波反电动势和方波电流之间的关系,如图1所示。
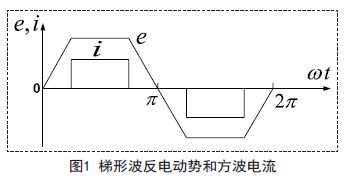
BLDCM的反电动势波形是梯形波,并且定子和转子间的互感是非正弦的,在此,采用$感应电动机d-q变换理论的方法进行分析效果不理想,而直接利用电动机原有的相变量法,根据转子位置,采用分段线性表示感应电动势。
本文以两相导通星形三相六状态方式下,分析BLDCM的数学模型及电磁转矩等特性。为了方便分析,作如下假设:
(1)三相绕组完全对称,气隙磁场分布为梯形波,平顶宽为120°电角度;
(2)忽略齿槽、换相过程和电枢反应的影响;
(3)磁路不饱和,不计涡流和磁滞损耗;
(4)电枢绕组在定子内表面均匀连续分布。
则根据BLDCM的特性,可建立其电压平衡方程、电磁转矩方程以及转子运动方程。
2.1 电压平衡方程
BLDCM三相定子电压的平衡方程可用以下方程表示:
其中,u a、u b、u c为定子相绕组电压;ia、ib、ic为定子相绕组电流;ea、eb、ec为定子相绕组反电势;L为每相绕组的自感;r为每相绕组的内阻;M为每两相绕组的互感。
由于转子磁阻不随转子的位置变化,因而定子绕组的自感和互感为常数。当采用Y形联结时,ia+ib+ic=0,因而有:
3.无刷直流电机模型设计
在Matlab R2012的Simulink环境下,利用SimPowerSystem Toolbox 5.6丰富的模块库,在分析BLDCM数学模型的基础上,建立$BLDCM控制系统仿真模型,系统设计框图如图2所示。
无刷直流电机控制系 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)