无刷直流电机控制系统的设计方案
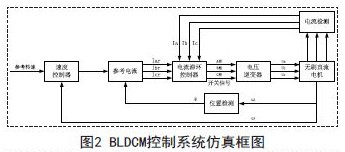
如图2所示,BLDCM控制系统采用双闭环控制:速度环采用PI控制,电流环采用电流滞环比较器。将图2所示控制系统分割成各个独立的子模块,其中主要包括:
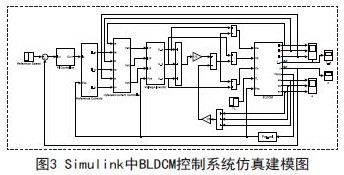
BLDCM本体模块、参考电流模块、电流滞环控制模块、电压逆变模块、速度控制模块、转矩计算模块。将各个模块进行有机的整合,即可建立BLDCM控制系统的仿真模型,如图3所示。
3.1 BLDCM本体模块
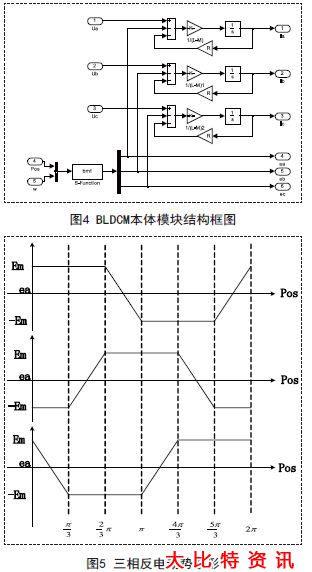
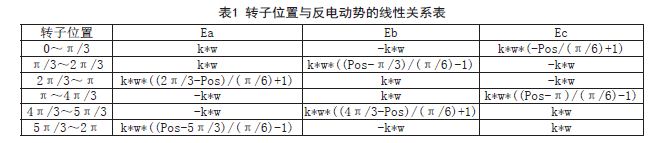
在整个控制系统中,BLDCM本体模块是最重要的部分,该模块根据BLDCM电压平衡方程式(2)求取BLDCM三相相电流,控制框图如图4所示,由电压平衡方程式(2)可得,要获得三相相电流ia、ib、ic,必需首先求得三相反电动势ea、eb、ec.在BLDCM建模过程中,获得理想的梯形波反电动势波形是一个关键的问题。目前求取反电动势常用的方法有:(1)有限元法;(2)傅里叶变换法;(3)分段线性法,如图5所示,将一个运行周期分为6个阶段,每60°为一个换相阶段,每一相的每个运行阶段都可用一段直线来表示,根据某一时刻转子位置和转速信号,确定该时刻各相所处的运行状态,通过直线方程即可求得反电动势波形。分段线性法简单易行,且精度较高,能够较好的满足仿真建模的设计要求。因此采用分段线性法建立梯形波反电动势波形。
根据图5可以推得转子位置和反电动势之间的线性关系,如表1所示,从而采用分段线性法,解决了在BLDCM本体模块中梯形波反电动势的求取问题。
3.2 电流滞环控制模块
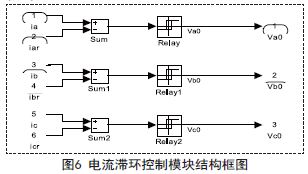
$电流滞环控制模块的作用是实现滞环电流控制,输入三相参考电流以及三相实际电流,输出为逆变器控制信号,模块结构框图如图6所示。将实际电流和参考电流之间的偏差与滞环比较器的环宽进行比较,对应相导通或关断。选择适当的滞环比较器环宽,即可使实际电流波形不断跟踪参考电流的波形,实现电流闭环控制。
k为系数,Pos为位置信号,w为转速信号。
无刷直流电机控制系 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)