基于DSP的无刷直流电机控制器设计
1 无刷直流电机控制原理
无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。
控制电路对转子位置传感器检测的信号进行逻辑变换后产生脉宽调制PWM信号,经过驱动电路放大送至逆变器各功率开关管,从而控制电动机各相绕组按一定顺序工作,在电机气隙中产生跳跃式旋转磁场。下面以两相导通星形三相六状态无刷直流电动机为例来说明其工作原理。无刷直流电机主回路原理图如图1所示。
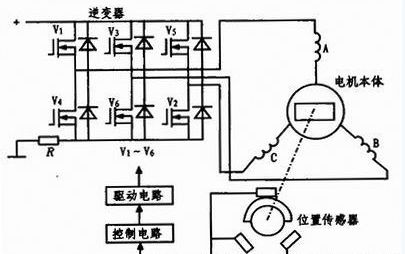
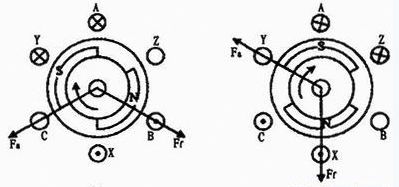
当转子稀土永磁体位于图2(a)所示位置时,转子位置传感器输出磁极位置信号,经过控制电路逻辑变换后驱动逆变器,使功率开关管V1、V6导通。即绕组A、B通电,A进B出。电枢绕组在空间的合成磁势Fa如图2(a)所示。此时定转子磁场相互作用拖动转子顺时针方向转动。电流流通路径为:电源正极→V1管→A相绕组→B相绕组→V6管→电源负极。当转子转过60°电角度,到达图2(b)中位置时,位置传感器输出信号经逻辑变换后使开关管V6截止,V2导通,此时V1仍导通。则绕组A、C通电,A进C出,电枢绕组在空间合成磁场如图2(b)中Fa。此时定转子磁场相互作用使转子继续沿顺时针方向转动。电流流通路径为:电源正极→V1管→A相绕组→C相绕组→V2管→电源负极,依此类推。当转子继续沿顺时针每转过60°电角度时,功率开关管的导通逻辑为3V2→V3V4→V5V4→V5V6→V1V6→V1V2→V3V2→……,则转子磁场始终受到定子合成磁场的作用并沿顺时针方向连续转动。本设计中的无刷直流电机是一台额定功率为1.5 kW,额定转速为4 000 r/min的无刷直流电机,供电为270 V直流,根据电机本身特性进行系统及各模块设计。
2 系统构成
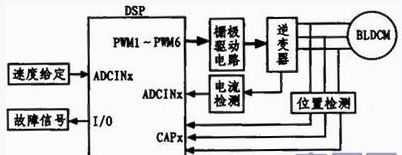
图3为系统构成框图。控制器采用高性能的数字信号处理器TMS320F2812作为控制核心,电流采样及位置检测采用了芯片内置模块,实现了高度的集成化;以高精度霍尔传感器作为系统位置反馈元件;以高精度检测电阻作为电流反馈元件;构成数字化速度和电流双闭环控制系统。考虑到电机PWM驱动信号的载波频率比较高,功率模块选择了MOSFET开关管。
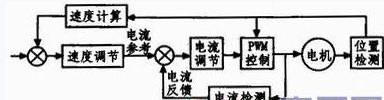
由图4可以看到这是一个典型的双闭环调速系统,包括一个速度调节环和一个电流调节环。首先根据检测到的转子位置信号,计算得到电动机的当前转动速度,然后与速度参考值比较得到速度偏差值,经过一个PID控制器后得到相应的电流参考值。该电流参考值与实际的电动机的电流反馈值进行比较,偏差的值经PID调节后将生成的PWM信号加到电动机的功率驱动主回路上。通过控制功率管的开通顺序和时间,可改变电动机定子绕组中的电流大小和绕组的导通顺序,从而实现对直流无刷电动机转速的控制。
3 系统各模块实现
3.1 电流的检测和计算
电流的检测是采用精度较高的检测电阻来实现的,将检测电阻串联接到直流母线中。电阻值的选择考虑了当过流发生时能输出的最大电压。
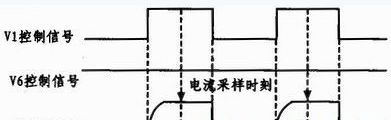
每—个周期对电流采样一次。本设计中PWM周期为50μs,则电流的采样频率为20 kHz。开关管采用PWM控制,载波为三角波。在PWM周期的“开”的瞬间,电流上升并不稳定也不易采样。所以电流采样时刻应该是在PWM周期的“开”的中部,如图5中的箭头即为电流采样肘刻。电流采样通过DSP定时器采用连续增减计数方式的周期匹配事件启动ADC转换来实现。
3.2 位置检测和速度计算
无刷直流电机需要不断地对三相无刷直流电动机进行换向。掌握好恰当的换相时刻可以减小转矩的波动。因此位置检测是非常重要的。同时通过位置检测信号计算出当前电机的速度数据。
位置信号是通过3个霍尔传感器得到的。每一个霍尔传感器都会产生180°脉宽的输出信号,3个霍尔传感器的输出信号有120°相位差。通过将DSP设置为双沿触发捕捉中断功能,就可以获得这6个时刻。通过将DSP的捕捉口CAP1~CAP3设置为I/O口、
DSP无刷直流电机控制 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)